




Abstract
The emission function from ground-based light sources predetermines the skyglow features to a large extent, while most mathematical models that are used to predict the night sky brightness require the information on this function. The radiant intensity distribution on a clear sky is experimentally determined as a function of zenith angle using the theoretical approach published only recently in MNRAS, 439, 3405–3413. We have made the experiments in two localities in Slovakia and Mexico by means of two digital single lens reflex professional cameras operating with different lenses that limit the system's field-of-view to either 180º or 167º. The purpose of using two cameras was to identify variances between two different apertures. Images are taken at different distances from an artificial light source (a city) with intention to determine the ratio of zenith radiance relative to horizontal irradiance. Subsequently, the information on the fraction of the light radiated directly into the upward hemisphere (F) is extracted. The results show that inexpensive devices can properly identify the upward emissions with adequate reliability as long as the clear sky radiance distribution is dominated by a largest ground-based light source. Highly unstable turbidity conditions can also make the parameter F difficult to find or even impossible to retrieve. The measurements at low elevation angles should be avoided due to a potentially parasitic effect of direct light emissions from luminaires surrounding the measuring site.
1 INTRODUCTION
The upwardly emitted light from artificial light sources is subject to different performance depending on the optical characteristics of the atmosphere (Garstang 2000; Kocifaj 2007; Cinzano & Falchi 2012; Horvath 2014). Fluctuations of the night sky radiance in a cloud-free atmosphere are determined by aerosol particles to a large extent since the air pollution acts as a distinguished modulator of down welling radiation due to absorption and scattering processes (Garstang 1991; Joseph, Kaufman & Mekler 1991; Aubé et al. 2005; Kocifaj 2007). Aerosol microphysical characteristics might undergo substantial changes even under clear sky conditions because of turbulent mixing, raising humidity and change of wind direction, thus resulting in discernible influence of local polluters surrounding a measuring site (Bukowiecki et al. 2002). These atmospheric variations coupled with the physical properties of the ground-based light sources appear to be decisive factors influencing the skyglow originated from artificial night lighting (Kocifaj & Solano Lamphar 2013). Basically, the atmospheric optics rescales the light emission patterns that are further transformed along the beam path in a turbid atmosphere. As a consequence, the sky radiance distributions are distorted in a complex manner depending on a distance from a ground-based light source (Cinzano & Castro 2000; Kocifaj & Solano Lamphar 2014).
It is becoming increasingly difficult to ignore the consequences of the skyglow, since this problem has become a central issue for astronomers, environmentalists, physicists and biologists (Hoag, Schoening & Coucke 1973; Elliott 1981; Alvarez del Castillo, Crawford & Davis 2003; Kirschbaum 2003; Rich & Longcore 2005; Hosseini & Nasiri 2006; Kocifaj 2007; Chepesiuk 2009; Smith 2009; Falchi et al. 2011; Aubé, Roby & Kocifaj 2013). So far, there has been little discussion about the bulk emission function of ground-based light sources. The radiant intensity distribution as a function of zenith angle is, however, an important feature of the radiation emitted by a light source, and plays an important role in the subsequent skyglow. Falchi et al. (2011) introduced a method to measure the fraction of artificial sky brightness due to direct lights from sources and that due to the reflection from surfaces. In addition, Falchi (1999) and Cinzano et al. (2000) also used Defense Meteorological Satellite Program (DMSP) satellite data (in particular radiance as a function of angular distance from satellite nadir) to discuss the upward emission function of cities, while Luginbuhl et al. (2009) retrieved the upward intensity distribution for a particular city. Retrieval of the emission pattern of ground-based light sources is of great interest for modelling purposes, since this data is required as an input to many numerical tools (Garstang 1986; Cinzano, Falchi & Elvidge 2001; Kerola 2006; Kollath 2010). The optical properties of the atmosphere are constantly varying, while the temporal changes of bulk emission function are marginal.
A theoretical method for determination of the fractions of upwardly emitted and reflected radiation was developed only recently by Kocifaj & Solano Lamphar (2014) who introduced a fast algorithm for obtaining the parameters of Garstang's function as the best fit to the sky radiance data. However, the methodology suggested by the authors can also be applied to other types of parametrizable emission functions. In this study, the authors evaluate the ratio of the zenith brightness relative to the horizontal irradiance for a number of distances that separate an observer from the city borders. In general, artificial lights can be distributed heterogeneously over the territory of a radiating city. Absence of the circular symmetry, non-uniform emissions from different parts of a city, as well as light emissions from nearby cities are factors that limit accuracy of the method. However, the method works quite well as long as only one of these factors violates the above discussed conditions manifestly. Additionally, the measurements nearby city edges have not to be made at low elevations to avoid direct beams from luminaires and high buildings. The experimental data can be acquired using traditional and inexpensive devices, implementing a calibration procedure based on the optical characteristics of the equipment.
In order to obtain the parameters of emission function from an experimental data it is required to measure the zenith radiance B and the horizontal irradiance D concurrently at few discrete distances from the light source. The Garstang's parameters can be then found by minimizing the differences between theoretically and experimentally determined ratios of B/D. In this paper we have simplified the above concept and analysed its applicability under distinct conditions. The source of errors and uncertainties are presented in detail together with calibration routines and data processing that all are extremely important for experimentalists who want to measure skyglow routinely over many places in the world. It is easy and straightforward to measure both the zenith radiance and horizontal irradiance, thus the presented method has the potential to be used regularly in remote sensing of light emissions from Garstang's-like sources. We also present a dedicated portable camera-based device that is suitable for in situ measurements. The measurements were carried out by using two professional cameras with different optics to demonstrate the effect of an instrument's field-of-view (FOV) on the information content of experimental data. Incomplete sky images correspond to the opening angle smaller than 180°. The fieldwork was conducted under clear sky conditions in the city of Los Mochis in the north-west of Mexico and in the vicinity of Bratislava city located in central Europe. Los Mochis is well isolated place, while many small-sized light sources are dispersed near Bratislava city. Both cities have an easy access with no one orographic obstacle that would be worth to explore its effect on results or that could impede the measurements.
2 EXPERIMENTAL METHODS
The experimental device was designed around a ST microelectronics microcontroller STM32F100 × 6 with ARM architecture that allows to interact with the whole system easily. An important component of the development is a monolithic photodiode transimpedance amplifier that is used for average detection of an ambient night lighting. The specific measuring process is performed by a professional digital single lens reflex (DSLR) camera. The camera takes the pictures in RAW format, while the exposure time of every picture is managed based on the signal obtained from the monolithic photodiode transimpedance amplifier. Specific software has been developed and operated at PC platform to supervise the microcontroller and to process the pictures taken by the two cameras with two different apertures. A semifisheye lens is used as an optical element of the Canon 60d: SAMYANG 8-mm, f/3.5 with a manual focus. The FOV is 167º on Canon APS-C sensors (advanced photo system type-C). A complete fisheye lens is used as an optical element of the D80: Sigma 4.5-mm f/2.8 EX DC HSM Circular Fisheye Lens. The FOV on Nikon APS-C sensors is 180º.
2.1 Preparation of the experimental data
DSLR cameras have become an important alternative tool in lighting studies (Craine 2007; Wuller & Gabele 2007; Fliegel & Havlin 2009). As well, these cameras have been also seriously considered as a monitor system of the night sky radiance (Kollath 2010; Kollath & Kranicz 2014; Solano Lamphar & Kundracik 2014). In this work, the following devices have been used for obtaining the experimental data: a DSRL camera with APS-C sized 18.0-Megapixel CMOS sensor with a linear response and a photopic spectral sensitivity, and a DSRL camera with APS-C sized 10.2-Megapixel CCD sensor with a linear response and a photopic spectral sensitivity. The linearity was guaranteed by operating the sensors farther below the saturation levels. Both cameras cannot be used at the same time, as it requires a configuration that depends on the characteristics of the camera being used at the moment. As well, it is highly recommended to use the same device to obtain both zenith radiance and horizontal irradiance, since it makes calibration process heavily simplified. Such approach is typically used to avoid aging effect of colour filters and/or to eliminate uncertainties otherwise associated with calibration of two different systems (including sensors and lens optics). Consequently, the lens is oriented towards the zenith in order to take an image in RAW format that provides source data suitable for further processing. The procedure was repeated several times at different distances from the city.
2.2 Data pre-processing
Recently, there has been an increasing interest in the use of DSLR cameras for skyglow measurements. However, in order to obtain reliable data, a calibration process needs to be undertaken considering the characteristics of the camera sensor and the optics of the lens. DSLRs typically have a CMOS or a CCD sensor as a main device in digital imaging. These sensors are prepared to obtain RAW (uncorrected) data. In this context, the electric current from any pixel is proportional to an amount of photons captured by the pixel. As well, a false signal from thermally activated electrons has to be subtracted in case of long exposure measurements. The edges of the active area of modern CMOS sensors are covered with an opaque material, thus this part of the sensor is commonly used to determine the zero-level signal (a dark frame picture). In contrast, a dark frame image alongside every normal picture has to be taken in order to subtract the signal from the CCD caused by temperature-dependent thermal excitation of the sensor. In this case, it is required to take two images under the same camera settings in order to avoid errors in the measurement levels caused by such thermal dependence of the sensor.
CMOS and CCD sensors are in principle grey scaled. The coloured picture is obtained thanks to a Bayer mask in case of Canon 60D and Nikon D80. A filter with regular pattern covers every pixel with red, green or blue colours (GB/RG). In order to obtain the colour of each pixel, the information of every one is mixed considering the colour data of the neighbouring pixel. That procedure is unwanted for the purposes of this study. Therefore, RAW data from individual pixels have been processed. Thus, knowing the type and position of the Bayer filter, the correct signals in red, green and blue part of the spectrum were obtained.
The main disadvantage of this experimental method is that there is not a standard RAW format. Thus, the first step of data processing is a DSLR producer-specific RAW format conversion to a standard one (see Coffin 2008). The RAW data were transformed into a 16-bit PGM format following a common procedure of digital imaging, where the data are stored pixel-by-pixel as 16-bit integer numbers (0–65 535) to make it accessible by any program. We have developed a dedicated tool for conversion of Canon and NikonCR2 files (Canon/Nikon RAW) to PGM files using Open Source dcraw software. The data were normalized according to the parameters ‘dcraw -E -4 –W -j -t 0 raw.CR2’, where the result is a PGM file containing original uncorrected data, including the ‘black’ pixels at the border of the picture. Fig. 1 shows a typical RAW picture of the sky, where the city lights are easily to identify in the left-hand side of the figure. The Bayer mask is shown in the small figure inside. Black level signal can be retrieved from pixels located in left-hand and upper borders of the figure.
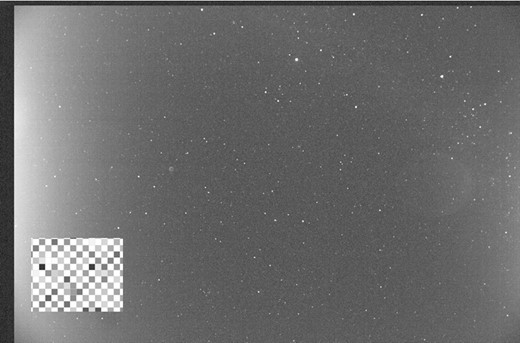
Typical RAW picture of a sky including the border with shielded pixels. Inset: detailed view to the individual pixel values. The contrast and the brightness of the picture were adjusted artificially to show clearly all important parts of the sky.
There is a specific problem when DSLRs are used in night light measurements; occasionally it is impossible to capture a picture not containing extremely bright objects (mainly lighting fixtures that shines directly on the lens producing an image on the sensor). Such small but extremely bright areas can significantly shift the resulting values of calculated integrals. Therefore, these small very bright areas were replaced by a median value of the picture brightness. However, this procedure was applied only to a few pictures, while the majority of disturbed sky scans were rather ignored.
The whole data pre-processing algorithm for both cameras (60d and D80) is the following.
Conversion of CR2 (Canon/Nikon RAW) to 16-bit PGM file using dcraw.
Calculation of mean zero-level from covered pixels (left-hand and upper border in Fig. 1).
Subtraction of zero-level from individual pixel values.
The small extremely bright objects were replaced by the median of the picture brightness if e.g. some pixel values are five or more times higher than that for the rest of the sky.
Retrieval of brightness in red, green and blue part of the spectrum using the information on type and position of the colour mask.
Such pre-processed picture was used for later calculations.
2.3 Lens calibration
Although the DSLR camera is suitable for lighting analysis its use for skyglow measurement has been limited by the lack of a correct calibration procedure. For instance, there are certain drawbacks associated with the use of non-calibrated lens.
The function f(θ, ϕ, x, y) that represents a projection of sky vault onto the sensor must be known to find the corresponding pixel coordinates x, y for a sky element with zenith θ and azimuth ϕ angles.
The transformation of sky radiance into the electric signal at the sensor depends on θ and can be expressed through so-called sensitivity function g(θ).
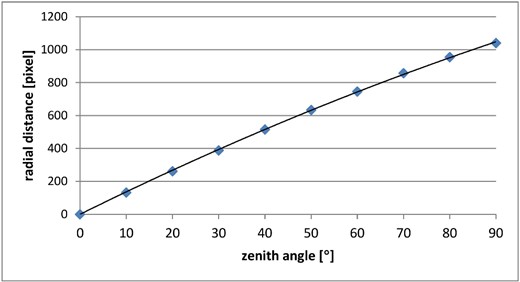
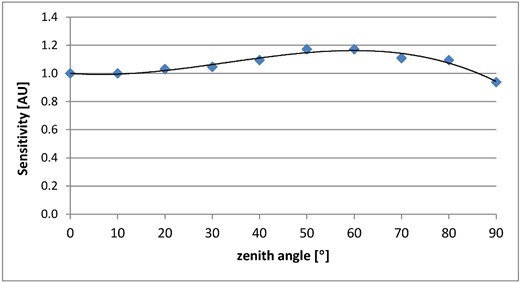
The functions f(θ, ϕ, x, y) and g(θ) were determined in laboratory conditions using a calibration technique that provides information on both (i) the symmetric distortion of fisheye lenses, and (ii) the correction of the x, y pixel coordinates. Tests of the system were performed in dark room with the purpose to find the lenses distortion and the projection angle. Having a calibration target fixed several pictures were taken at different exposure times and angles. Specifically, a small light source based on white led was placed 1 m away from the objective lens on its optical axis. Afterwards, the camera was moved relatively to the axis of the light source to obtain various values of θ. In each position a picture of the light source was captured. Using a standard picture processing software (e.g. adobe photoshop or corel photopaint) the position of the centre of the light source on the sensor was found and its brightness has been determined. Assuming an axial symmetry of the lens, the functions f(θ, ϕ, x, y) and g(θ) were constructed over θ, where the upper projection limit for the angle θ depends on the lens (see Figs 4 and 5).
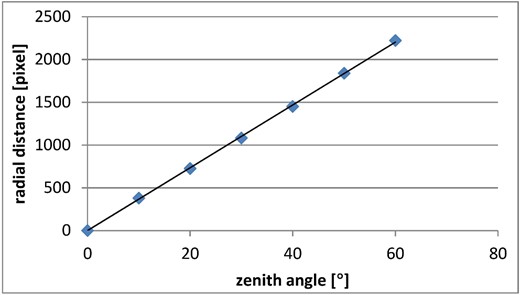
Pixel radial distance as a function of observational zenith angle θ for Canon 60d with incomplete hemispherical projection. The image is a rectangle (167° × 120°) producing a 180° FOV on the diagonal, but limiting the maximum of projected zenith distance to 60 on the short side.
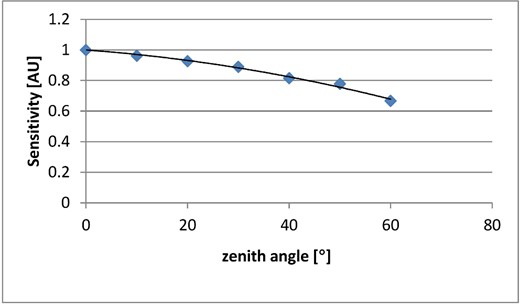
Relative sensitivity for Canon 60d embedded sensor as a function of zenith angle.
Nikon projection function plotted as pixel radial distance versus observational zenith angle θ.
Relative sensitivity for Nikon embedded sensor as a function of zenith angle.
2.4 Data processing
The data recorded from the whole hemisphere were used to calculate horizontally projected irradiance, while a small circular area at zenith was taken into account when determining the zenith brightness. Any requested area of the picture was divided into small parts of size Δθ, Δϕ. The amount of such parts predetermines the precision of the calculation, but also a computational time. In our model we have used a grid of size 5000 × 5000 that has been equally applied to irradiance and radiance calculations.
2.4.1 Zenith brightness calculation
2.4.2 Horizontal surface irradiance calculation
In both cases (in equation 2 or equation 3), the intensity I(θi, ϕj) was determined from I(xi, yj) by applying a backward transformation, i.e. mapping the polar coordinates to Cartesian coordinates. The software solution we have developed is fully automatized and runs over all pictures in database, while each fisheye image contains information on both zenith brightness and horizontal irradiance. It is important to mention that horizontal irradiance was only obtained for Nikon images, while it was necessary to cut the picture in a circular pattern (50º from the centre) in order to obtain the incomplete horizontal irradiance for Canon images. It is because acceptance angle for lens used on the Canon camera makes a readout of low beams impossible. Subsequently, the radiance data were obtained from the same picture cutting a small circle in the zenith of the circumference. Then, the ratio B(θ)/D was obtained at different distances from a city.
3 THEORETICAL METHODS
It has been shown by Kocifaj & Solano Lamphar (2014) that parameters of Garstang's emission function can be obtained from ratios of zenith radiance to horizontal irradiance, both measured at set of discrete distances from a city. Nevertheless, the solution concept is easily applicable to any type of emission function that has an analytical form and is parametrized through the total uplight (F) and the fraction of reflected light (G).
Retrieval technique requires that the N-dimensional vector |${\boldsymbol r}_{\rm T}$| with elements |$\left[ {B\left( \theta \right)/D} \right]_i^{\rm T}$|(i ∈ 〈1, N〉) is computed at N discrete distances from a city and consequently |${\boldsymbol r}_{\rm T}$| is compared against |${\boldsymbol r}_{\rm E}$| that is equally sized vector containing the ratios of |$\left[ {B\left( \theta \right)/D} \right]_i^{\rm E}$| experimentally determined at the same set of distances. The parameters F and G are found by minimizing the quadratic form of differences between theoretically predicted and measured data, i.e. |$\left| {{\boldsymbol r}_{\rm T} - {\boldsymbol r}_{\rm E} } \right|_{F,G}^2$|. The simplest way how to do this is to use the least-square method, but in more general case the solution SF, G is sought by minimizing the functional |$\left| {{\bf K}_{\bf T} S_{F,G} - {\boldsymbol r}_{\rm E} - {\boldsymbol \varepsilon }} \right|_{}^2$|, where |${\bf K}_{\bf T}$| is an integral operator acting on solution function SF, G so that |${\bf K}_{\bf T} S_{F,G} = {\boldsymbol r}_{\rm T}$| and |${\boldsymbol \varepsilon }$| is noise vector that represents experimental errors in each measuring point. The system of equations to be solved is most typically overdetermined since the measurements are made at more than 2–3 distances. It is therefore not a difficult task to find the best fit to F and G, although the minimum error that has been achieved can be still large enough. Besides experimental errors, such a weak convergence can either indicate optical instability of the atmosphere during a field campaign, or inconvenience of the theoretical model. However, such information is also valuable, since it suggests that the emission function of a city is most probably different from that considered by Garstang. This finding is a challenge for modellers who are encouraged to search for more appropriate model of radiant intensity distributions, but also for experimentalists who can gather as much data as possible near isolated cities under optically stable atmospheric conditions with aim to build worldwide database of data vectors |${\boldsymbol r}_{\rm E}$|. Systematic processing of best data sets can finally provide proper information about F and G or can be used to verify the range of applicability of different emission functions including that of Garstang-like.
Here, K = 3.912 is the so-called Koschmieder constant, which characterizes the standard visibility or visual range V (Middleton 1968) under the assumption that the contrast threshold for an observed target is 0.02 (Horvath 1995), while the functions R4 and Rcos can be found in Kocifaj & Solano Lamphar (2014). Note that the horizontal visibility (V) is commonly measured at actinometric or meteorological stations, and, the ratio of K/V is consequently used to determine the horizontal extinction coefficient (km−1). Bd1 and Bd2 are zenith radiances measured at distances d1 and d2 from the city centre, respectively. The measurements made at a number of distances form an overdetermined system that can benefit from higher accuracy of F. In addition, no calibration of experimentally determined radiances is necessary since we evaluate the ratio of two values recorded using the same device rather than two absolute values obtained independently of each other. However, the correction of SQM data has to be made under varying temperature conditions as suggested by Schnitt et al. (2013).
4 INFORMATION CONTENT OF EXPERIMENTAL DATA
The height of the light fixtures might appear a limiting factor in numerical inversion of the optical data near the city edges. The street lighting luminaire are usually situated several metres above the ground, thus tends to illuminate a measuring device by direct. The situation is even worse with tall buildings that emit the light toward all directions and can influence the measured data at several hundred metres from the light source. Fortunately, the data vector |${\boldsymbol r}_{\rm E}$| can be also constructed from incompatible set of |$\left[ {B\left( \theta \right)/D} \right]_i^{\rm E}$|, where D can be either complete or incomplete horizontally projected irradiance. In reality it means that different masking of horizon can be applied to limit the instrument FOV. The only requirement is that all data must be gathered by the same device (i.e. by the same camera). Once the nature of data vector elements is known, the corresponding theoretical values of |${\boldsymbol r}_{\rm T}$| can be computed. The minimization runs as described earlier in Section 3. It might appear desirable to reduce FOV near the city edges, since we can avoid unnecessary peaks due to direct light from some luminaires, but also unnecessary intensity decay due to high-elevation masking.
The information content of |${\boldsymbol r}_{\rm T}$| for synthetically generated data assuming different FOVs is analysed in Fig. 6 for small-sized cities (with characteristic sizes of 2 km) and in Fig. 7 for large-sized cities (with characteristic sizes of 10 km).
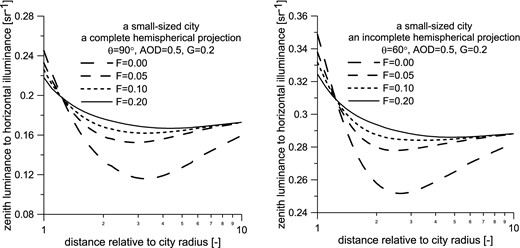
Zenith luminance relative to horizontal illuminance computed for small-sized city. Leftmost plot is for complete hemisphere, while rightmost plot is for the field of vision with 2θ limited to 120°.
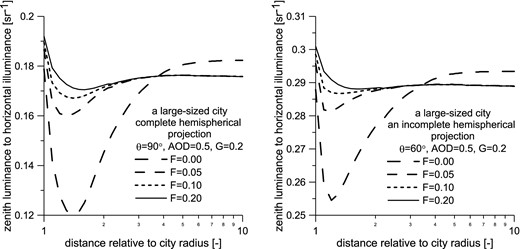
We have depicted the ratio of [B(θ)/D] as a function of distance and shown that the curves are similar in both cases, i.e. for complete and incomplete hemispherical projections. The only differences are the amplitude of the function and its steepness at small distances from the city. The same is accurate for large-sized cities (see Fig. 7) with exception that the ratio of zenith luminance to horizontal illuminance approaches its asymptotic behaviour 1–2 city radii from the city edge. This finding is not unexpected since the characteristic size of the city in Fig. 7 is five times larger than that in Fig. 6. The curves depicted in Figs 6 and 7 may change with optical properties of aerosol particles, especially with asymmetry parameter (ASY). It has to be noticed that ASY characterizes the spatial redistribution of scattered radiation. The most typical aerosol properties ASY = 0.8 and SSA = 0.9 were used in our model calculations, where SSA is so-called single scattering albedo of aerosol particles.
However, a limiting factor for making the inversion procedure successful is a temporal optical stability of the atmosphere at all distances. Fortunately, angular behaviour of city emission function does not change from day to day, thus a targeted field experiment can be repeated many times until the stable conditions are reached. Once the radiant intensity is determined as a function of the zenith angle, it can be used for a modelling in any time and under arbitrary meteorological conditions depending on a computational tool used for numerical modelling.
5 RESULTS
The comparative measurements using two cameras with different FOV were made in the vicinity of Bratislava city during the nights of 2014 May 21 and May 22. The measurements started before midnight at about 10:00 pm and finished not later than at 1:00 am. The sky conditions were not stable with high cirrus clouds, however, the meteorological situation has improved as the measurement continued. The atmospheric conditions were characterized by particulate matter PM10 ranging from 15 to 30 μg m−3 and relative humidity not exceeding 65 per cent. PM10 characterizes suspended particulates smaller than 10 μm in aerodynamic diameter. The values below 50 μg m−3 can be classified as low pollution level. This is a reason for why the sky scans were quite dark as documented in Fig. 8.
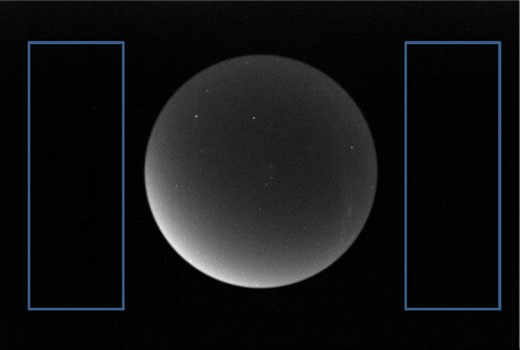
Typical sky brightness distribution near Bratislava city after removal of very bright objects. However, we have adjusted the contrast and brightness artificially to stress the effects of intensified brightness in the south-west quadrant due to light emissions from Bratislava city. Blue boxes on a photosensitive chip are used to read zero level signal.
Experimental ratios of zenith brightness to horizontal irradiance are depicted in Fig. 9 as a function of distance similar to what we have determined theoretically in Figs 6 and 7. The distance is measured relative to the city radius. Since near-horizon brightness are excluded from filtered data, the amplitudes of the experimental ratios are slightly higher than those plotted in leftmost part of Fig. 7. Horizontal irradiances for B-channel were also not taken into consideration due to high experimental errors. The measured profile of B(θ)/D suggests that F is as low as 0.1. Instead of data vector B(θ)/D we have only dealt with zenith brightness, since these data are obtained correctly for all red (R), green (G) and blue (B) channels, also with much simpler minimization routines than those for B(θ)/D.
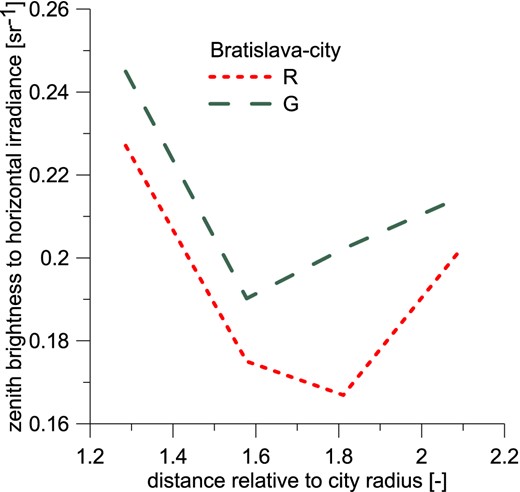
Zenith brightness to horizontal irradiance as determined experimentally near Bratislava city.
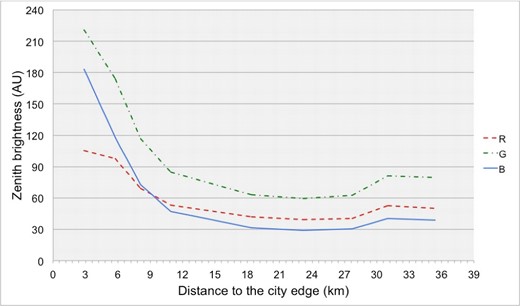
Zenith brightness in Bratislava surroundings plotted in arbitrary units as a function of distance from the city edge. Elevated values at distances above 25 km are due to emissions from Galanta city.
Our experiments were complemented by a field campaign in Los Mochis city, Mexico, aiming to analyse data from a territory with only one dominant light source. Basically, Los Mochis is well isolated, thus the zenith brightness is not influenced by a parasitic light from other cities. The optical measurements were made on 2014 April 2 and the results are plotted in Fig. 11 using arbitrary units. Variation of zenith brightness in the city territory is due to heterogeneity of public light distribution, while a local peak 8 km away the city is an effect of street lighting. This is produced due to the luminaires that are arranged along the way out of town. The uplights we have obtained for different parts of the spectrum: FB = 0.21 ± 0.10, FG = 0.21 ± 0.10 and FR = 0.15 ± 0.06 that are higher values than those found for Bratislava. It indicates an inadequate shielding of direct upward emissions from a considerable fraction of lamps and from other light sources. Evaluating the uplights from Los Mochis relative to those from Bratislava gives the ratios: FB(LM)/FB(B) = 1.75, FG(LM)/FG(B) = 2.28 and FR(LM)/FR(B) = 1.39. An amplification of FG by a factor of 2 or even more could be due to enhanced emissions to low elevation angles from green light sources, such as HPS, LPS and mainly advertisement boards.
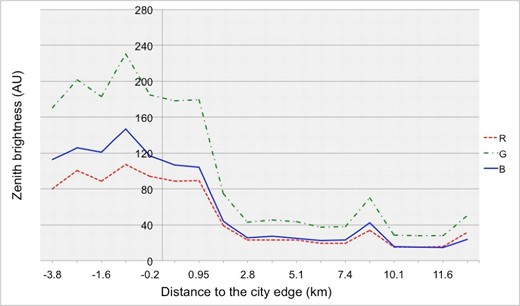
Zenith radiance in Los Mochis surroundings plotted in arbitrary units as a function of distance from the city edge. A local peak at distance of 8 km is due to street lamps outside the city.
Equations (4) and (6) can be also used to generate synthetic data of zenith radiance in the case both F and J(λ) are known for a monitored city. Each filter used must be known to apply this spectral sensitivity. However, the formulae (13)–(16) in Kocifaj & Solano Lamphar (2014) only approximate the full integrals introduced ibidem. Here we have used complete integral forms rather than approximations to determine uplight from zenith brightness data.
6 CONCLUSIONS
The emissions from ground-based cities or towns propagate in the atmosphere as a scattered light and cause an illumination of otherwise dark places. There are huge uncertainties in many properties of city lights, such as spatial distribution, spectral and directional characteristics of single lights and their interactions with the surrounding environment. While virtually unidentifiable, bulk light signal from a ground-based light source is fairly unknown due to the fact that it is submerged by the signals of a myriad of others. Because of their varied properties, interest has fermented recently in rapidly detecting and characterizing the superposition of light emissions from urbanized zones or large metropolitan regions. Because of the rapid development in the field and multidisciplinary nature of the topic, nowadays there is a substantial demand in retrieval of the fraction of light (F) radiated directly into the upward hemisphere.
In 2014 Kocifaj & Solano Lamphar have developed a contactless remote sensing method to extract F from ground-based observations of a clear sky. This time we have used and validated the method on a set of experiments made in Slovakia and Mexico. The method benefits of easy concept and use of a simple fisheye camera. Based on camera-specific projection and sensitivity functions the RAW images were analysed in order to retrieve zenith brightness B and cosine-projected irradiance D, which is a dedicated integral over all illuminated pixels. The advantage is that one picture contains information on both B and D, but the method presented here is only applicable under optically stable atmospheric conditions. Since the statistically averaged radiant intensity distribution is more-or-less stable for a given city, the field experiments can be repeated until the reliable solution is found.
There exist also approximate theoretical method indispensable in express analysis of zenith brightness data for which a vast data base already exists for many locations worldwide. This method allows one to reduce significantly the computational time and to apply fast inversion of SQM-like data to determine fraction F of the light radiated directly into the upward hemisphere. The presented approach also benefits from its wide applicability to different data achieved by different instruments, including fisheye lenses with incomplete hemispherical view.
The experimental data gathered in the vicinity of Bratislava city show that uplight F is about 0.1, implying that the direct upward emissions are lower than those in Los Mochis, and, most of the direct upward emissions are aimed at low angles above the horizon, having higher impact on skyglow at distant sites. Los Mochis emits two times more efficiently to the upper hemisphere compared to Bratislava. It is most probably due to poorly shielded luminaires and a public lighting system that might require a better design.
For the future, we prefer to analyse zenith radiance and horizontal irradiance separately since these two data sets form a complementary base with increased information content. It is because B as a function of distance d is similar to that of D(d), thus implying that a small perturbations applied on any of these two data functions may induce quite large response in the solution found. Both B and D can be determined in arbitrary units, thus no special calibration is necessary. Nevertheless, all elements of data vector should be obtained by the same device. The method developed here allows for adaptive FOV – it can help to avoid direct light emissions, e.g. near city edge. To extract a correct value of F from SQM-like data, the optical properties of the local atmosphere as well as the fraction G of the light that is isotropically reflected from the ground are required.
We conclude that the retrieval method is fairly good trade-off between complex indirect theoretical techniques and expensive direct monitoring of upward emissions from e.g. airplanes. Usually a few field campaigns are necessary until a reliable data are gathered. Although our experimental study was directed toward the reconstruction of Garstang's parameters, the methodology suggested is potentially applicable to any analytical function that is parametrized through F and G. Optical method used in this paper is a desirable technology for detection, primarily because such technology is rapid, the components are inexpensive and the techniques can be automated, requiring no highly specialized devices.
This work was supported by the Slovak Research and Development Agency under contract No: APVV-14-0017. HASL received a support from the National Council of Science and Technology of Mexico under the project Cátedras CONACYT # 2723. MK furthermore acknowledges the Slovak National Grant Agency VEGA (grant No. 2/0002/12).
REFERENCES

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}