Data Reduction Using Statistical and Regression Approaches for Ice Velocity Derived by Landsat-8, Sentinel-1 and Sentinel-2

 , , ,
, , ,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Data
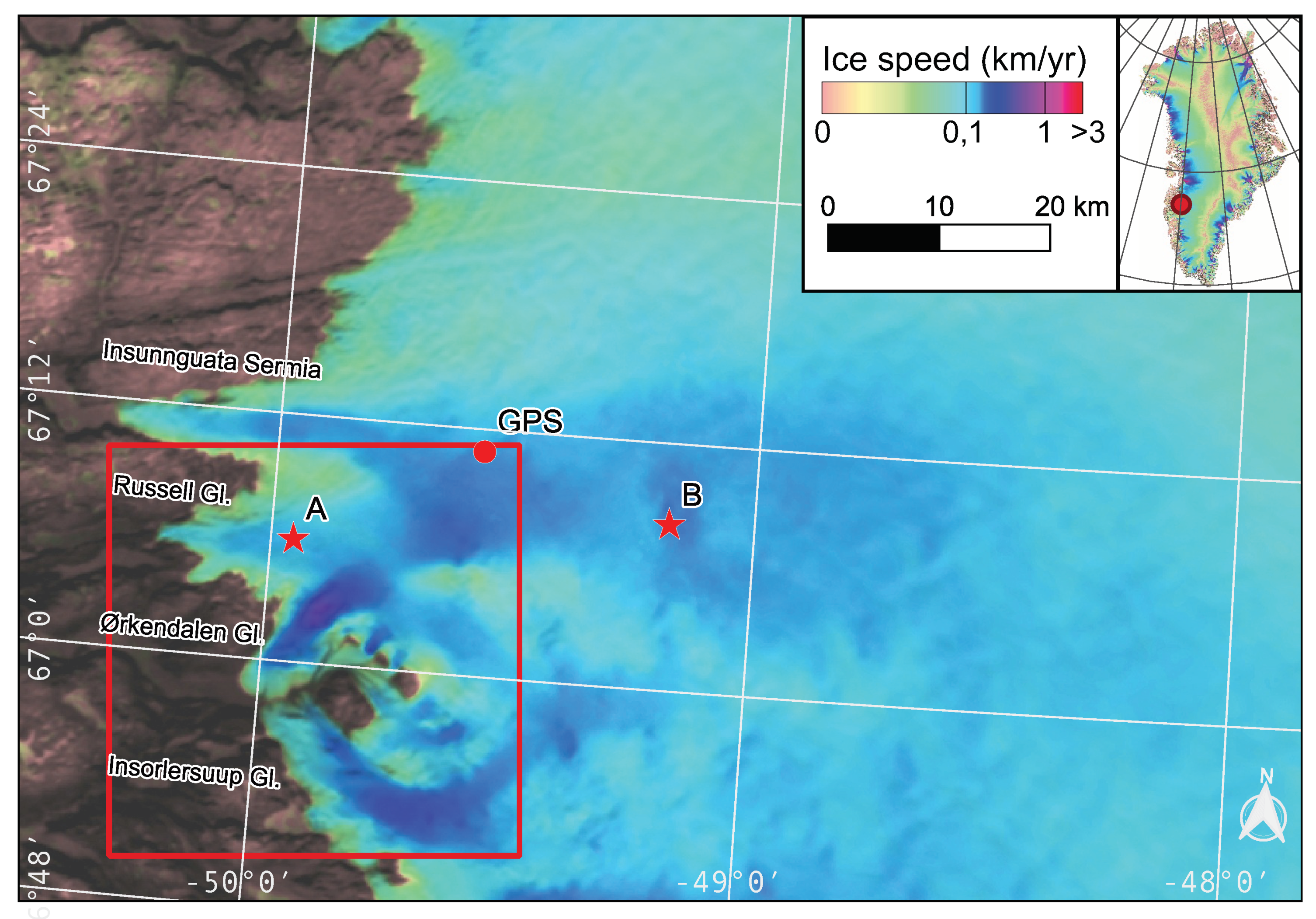
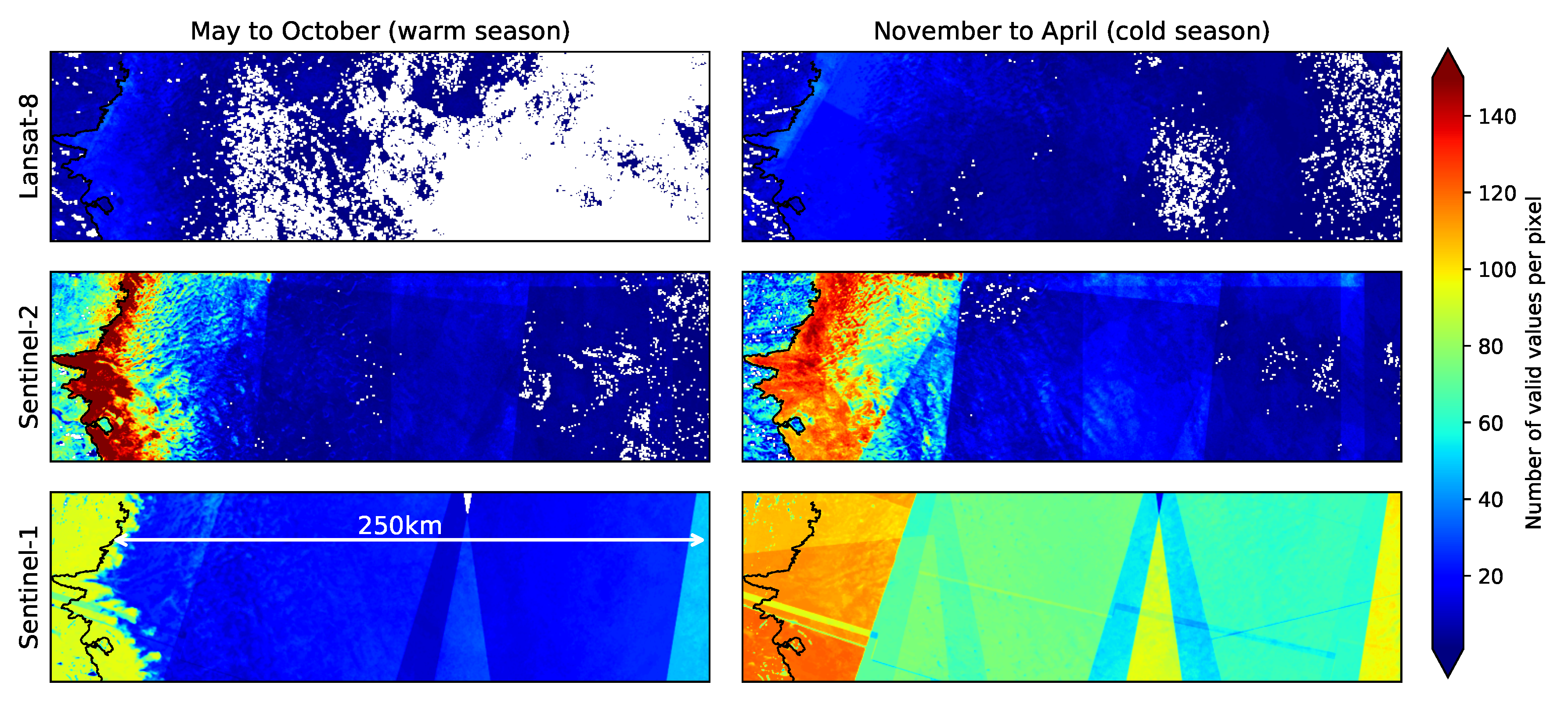
2.1. Study Area
2.2. Satellite-Derived Velocity Data
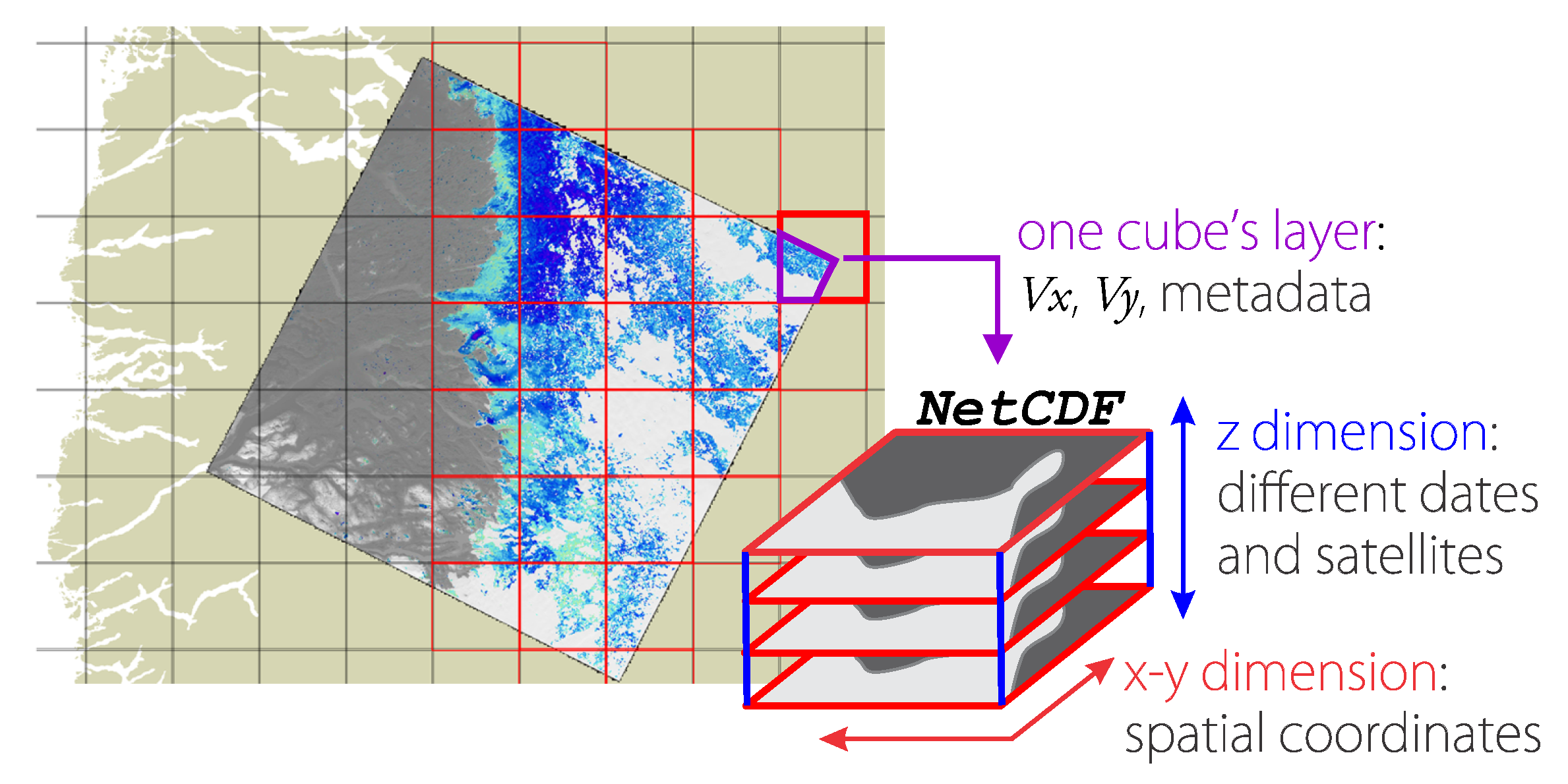
2.3. Ice Velocity Database Creation
2.4. In-Situ GPS Measurements
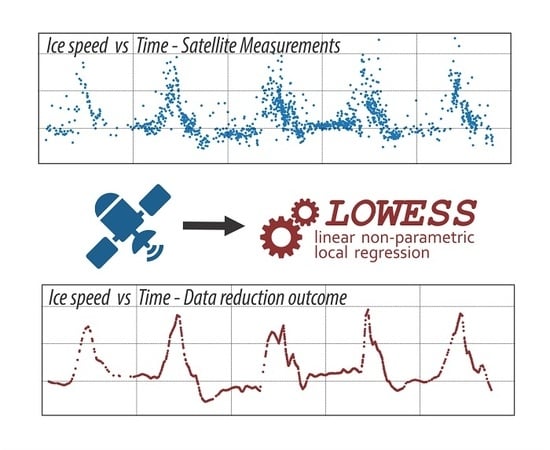
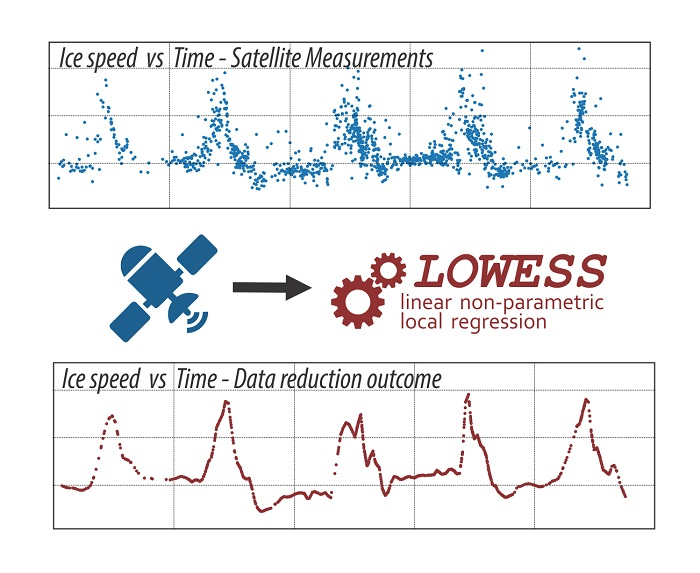
3. Velocity Post-Processing/Data Reduction
3.1. Rolling Mean or Median
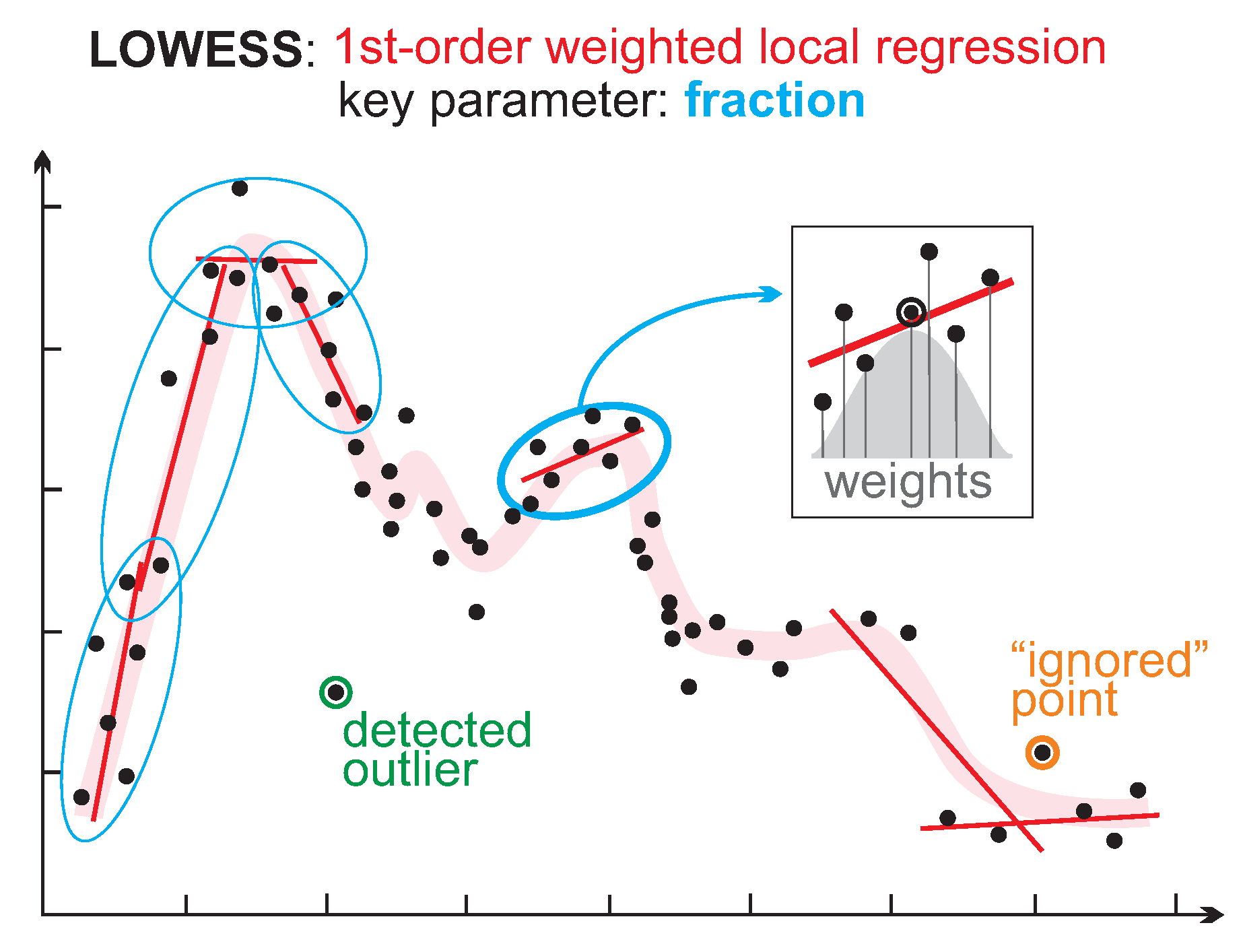
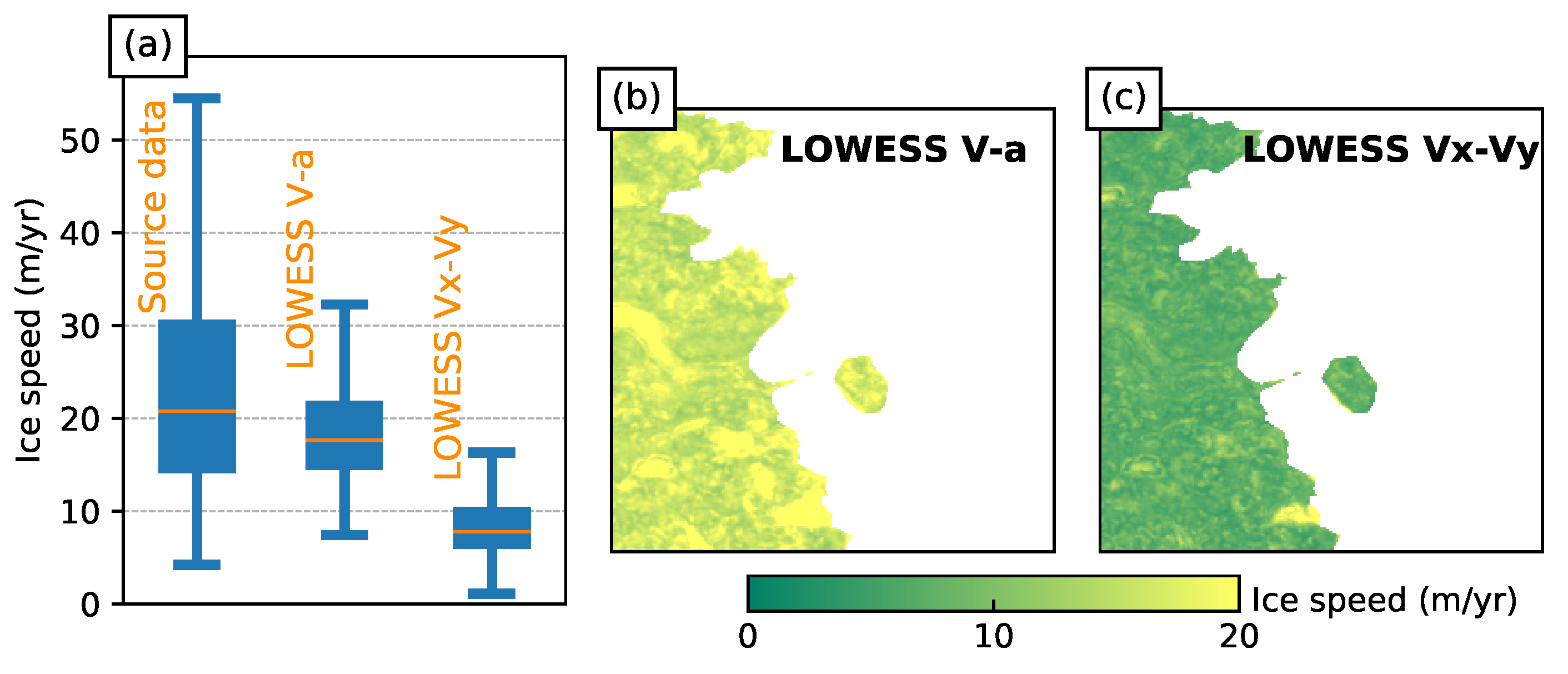
3.2. Linear Non-Parametric Local Regression: LOWESS
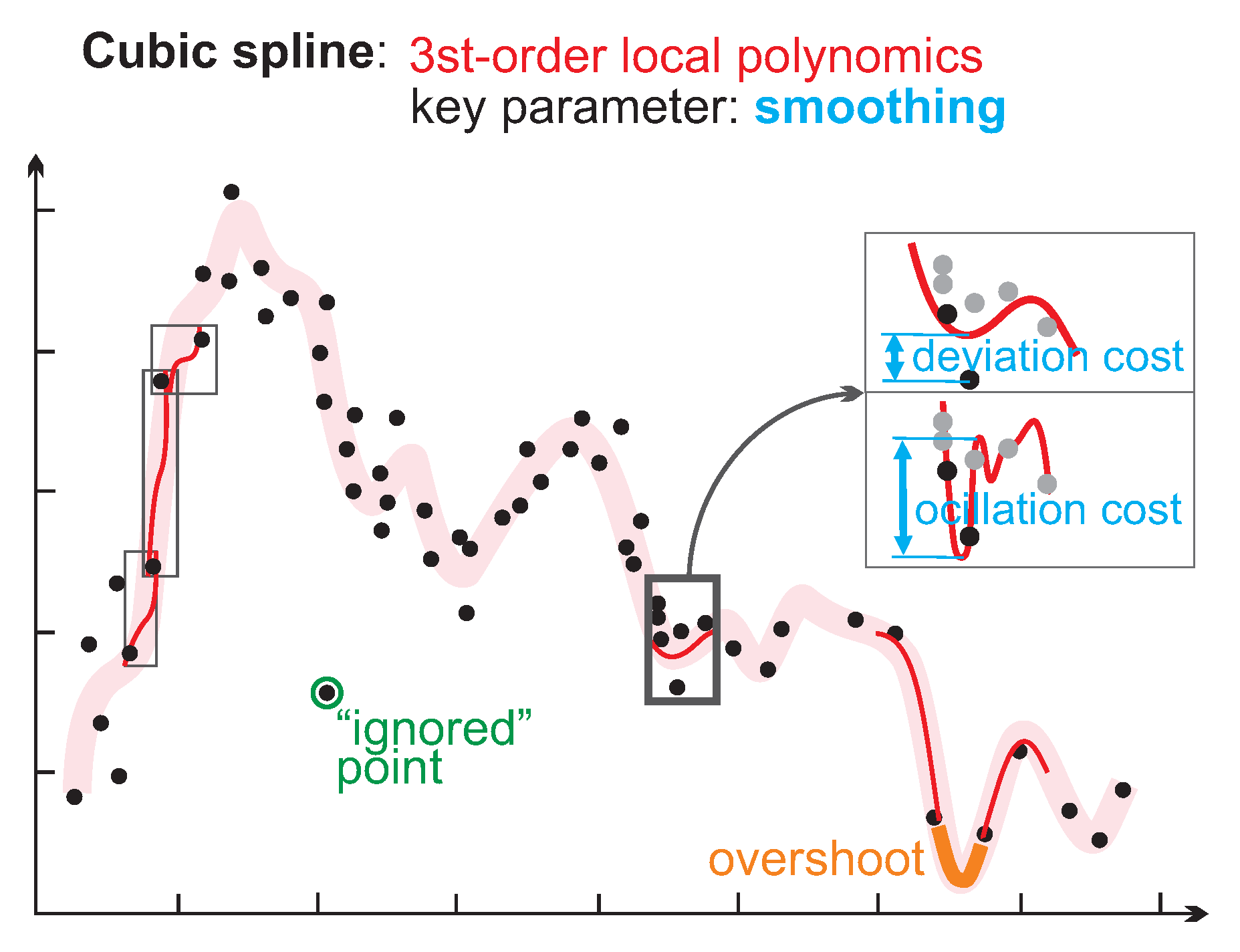
3.3. Cubic Spline Regression
4. Results
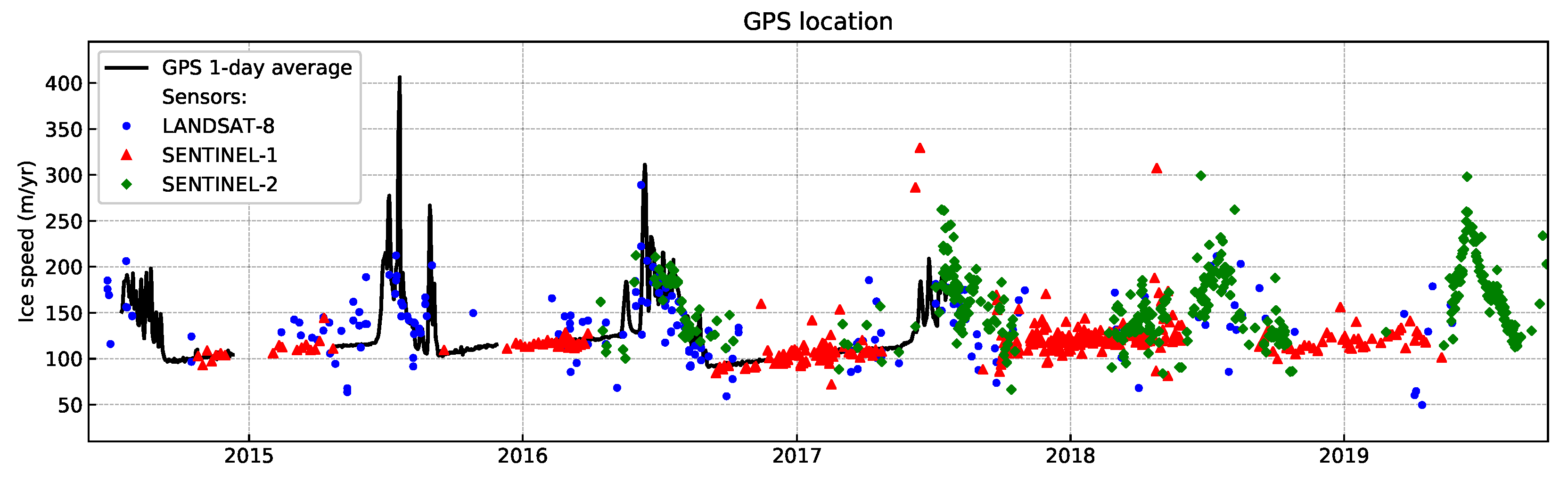
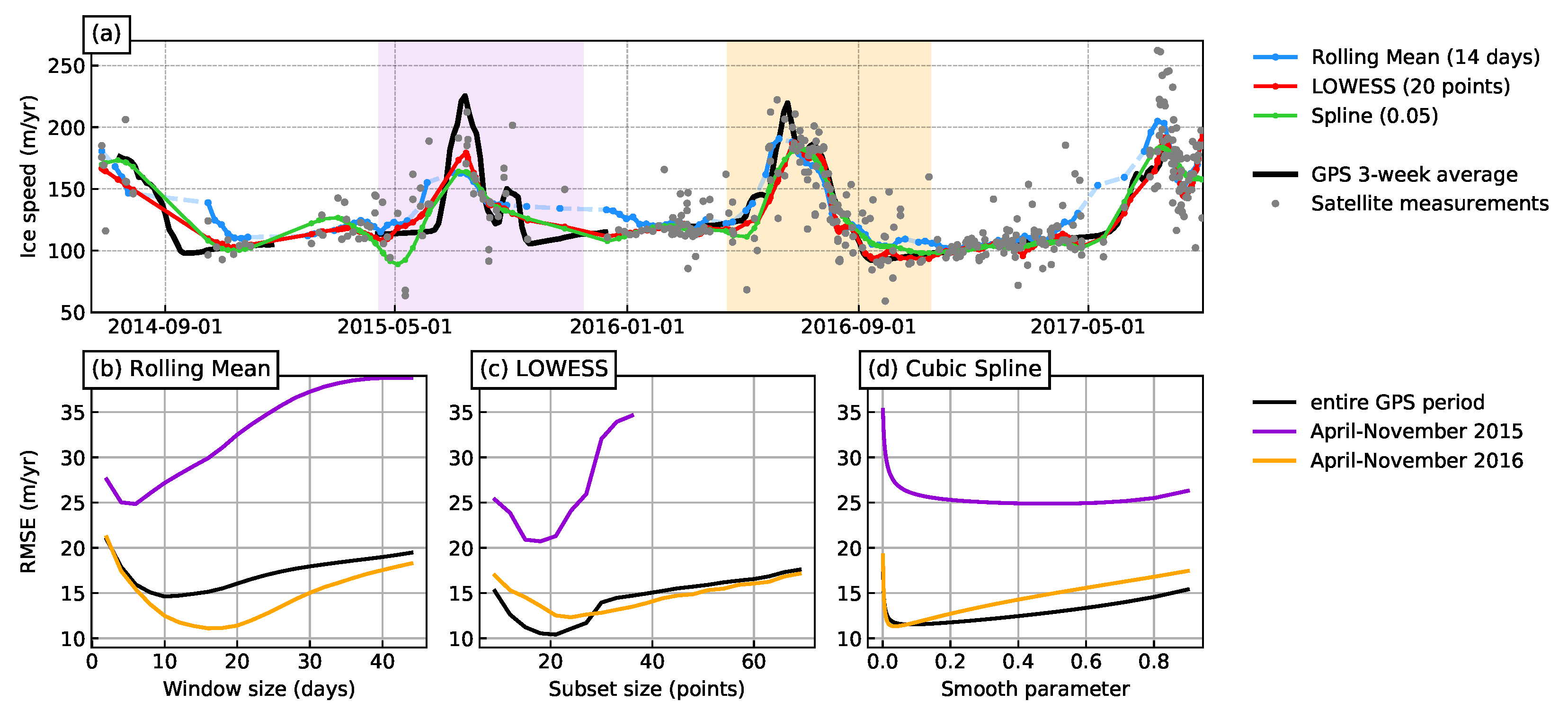
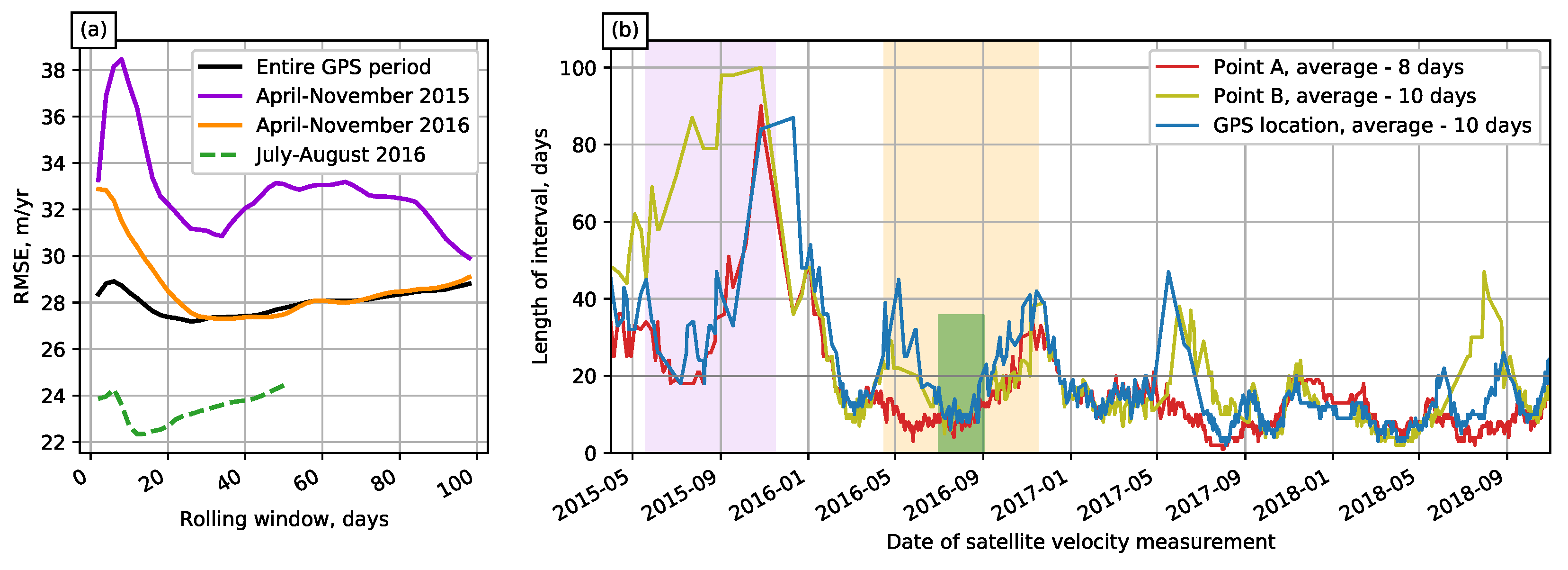
4.1. Comparison with GPS-Based Measurements
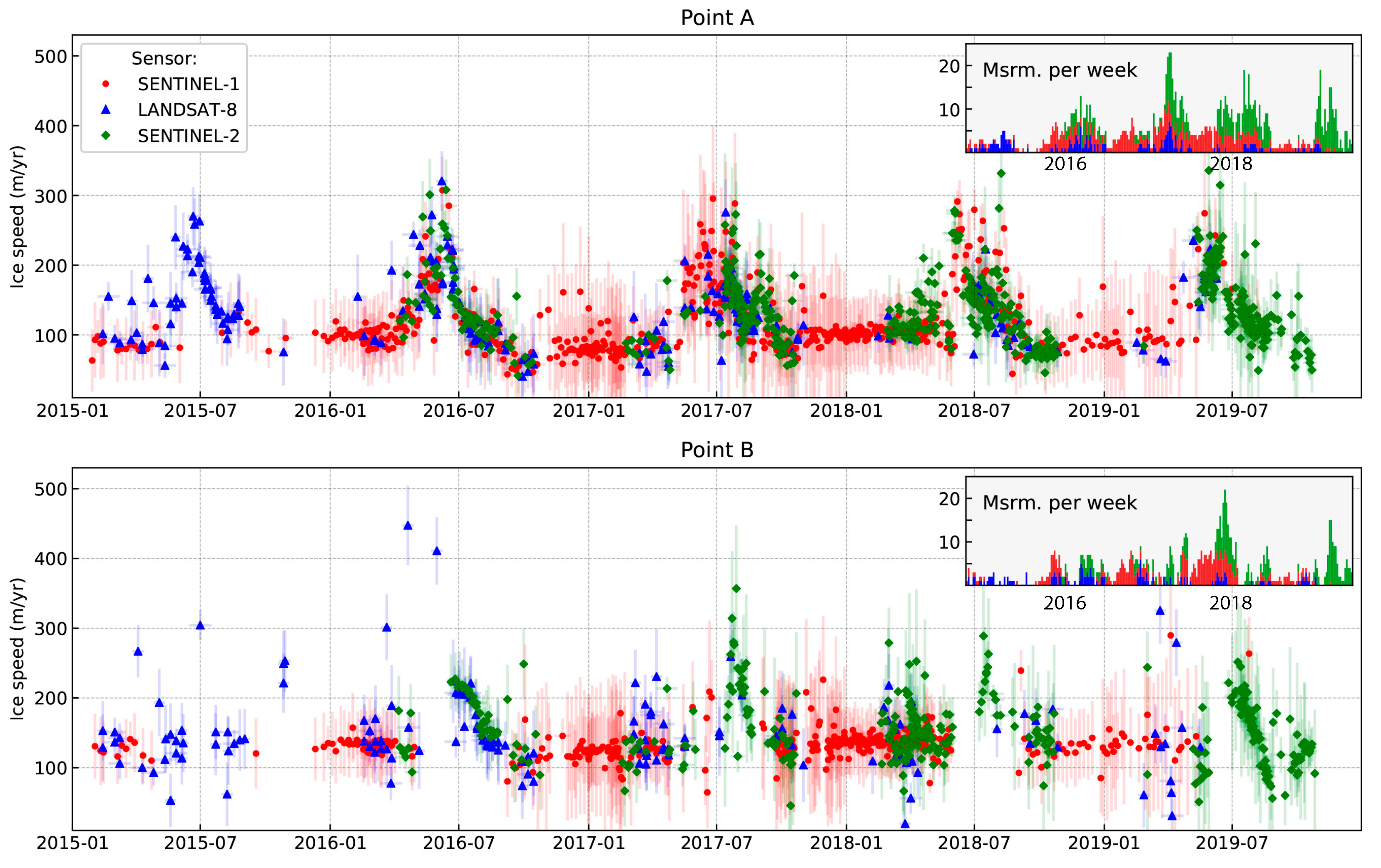
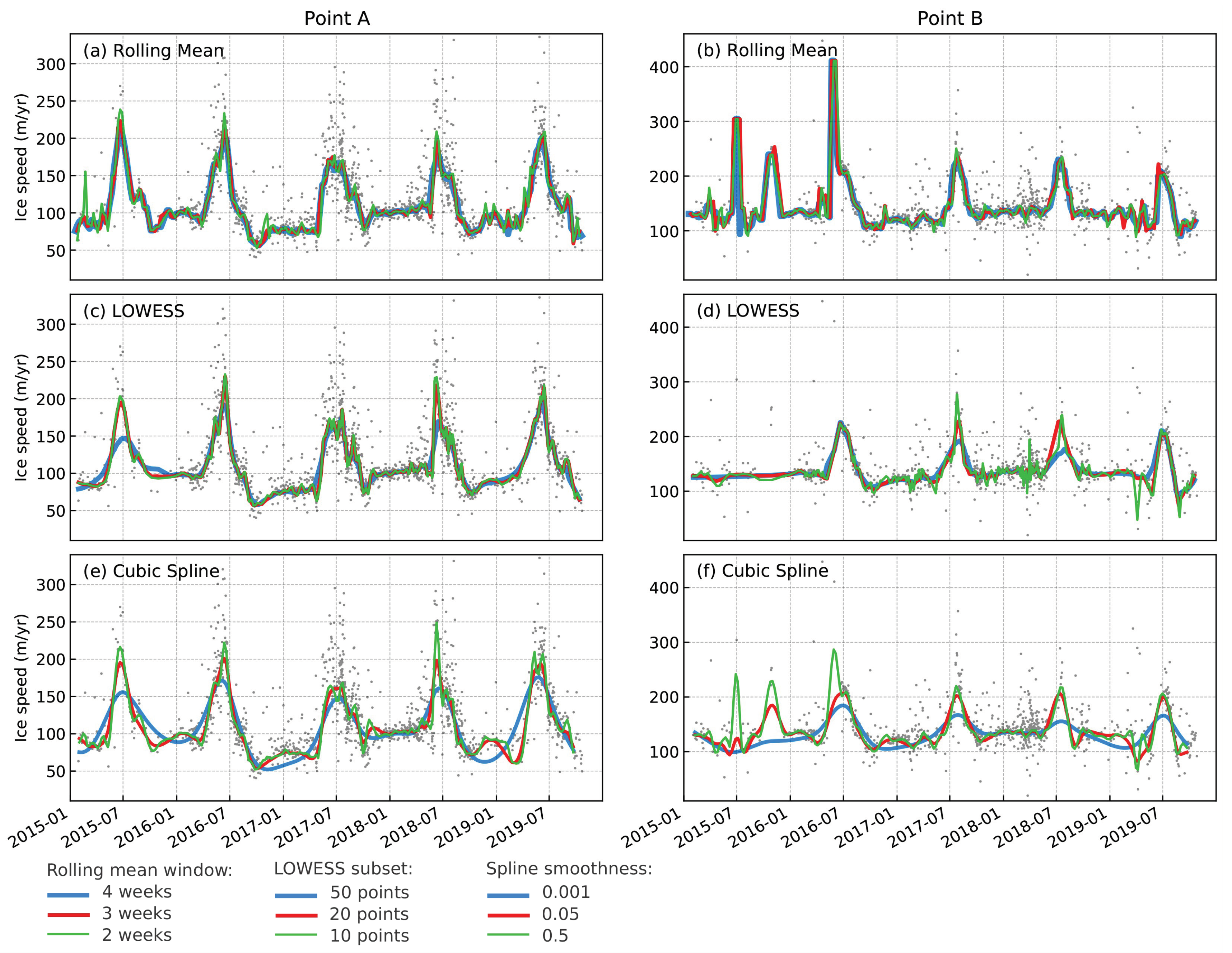
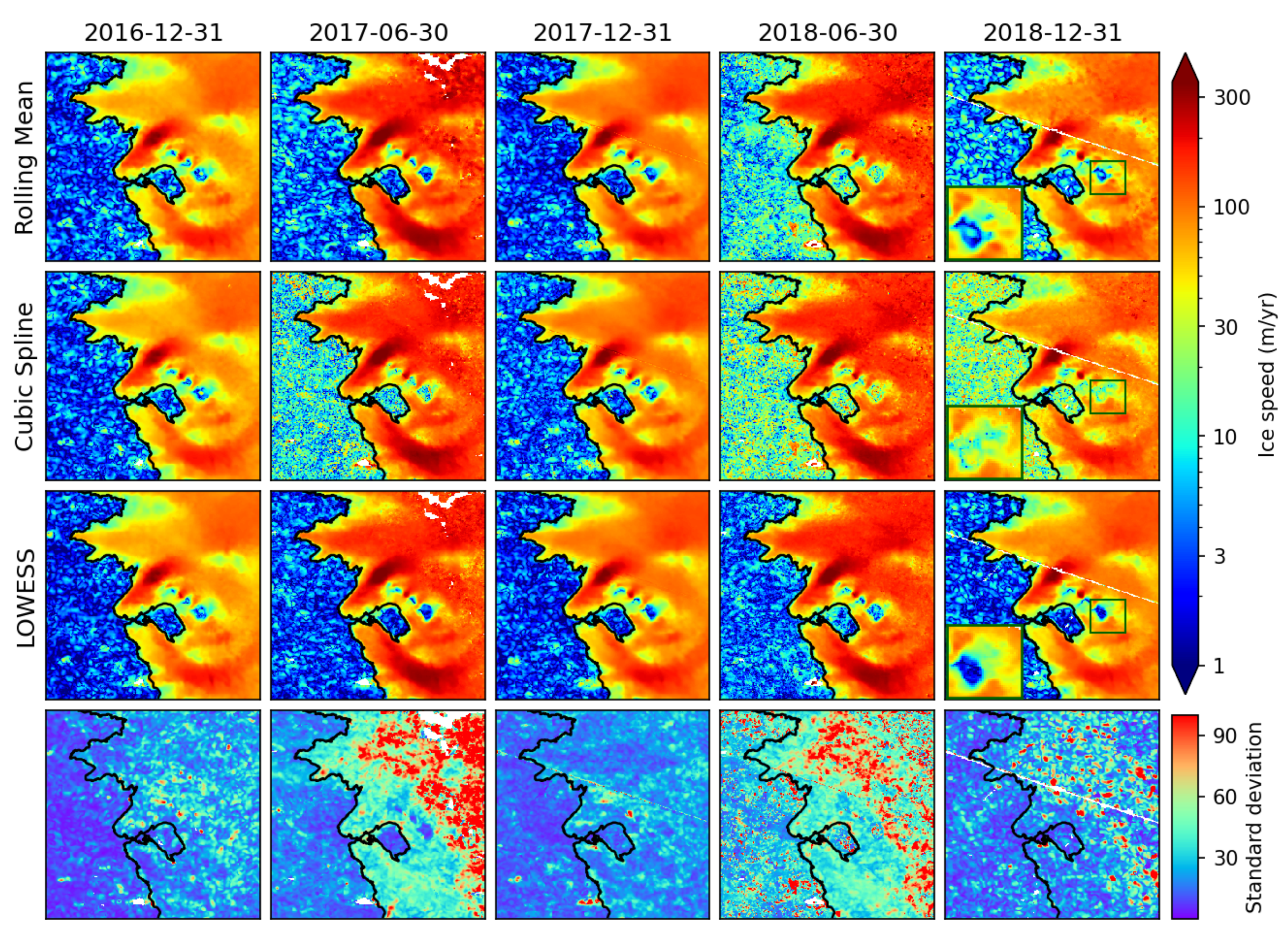
4.2. Time Series Post-Processing
5. Discussion
5.1. Multi-Sensor Time Series
5.2. Which Variables to Fit?
5.3. Data Reduction for Ice Velocity
5.4. Temporal Resolution and Measurement Accuracy
5.5. Other Potential Ways of Improving Post-Processing
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moon, T.; Joughin, I.; Smith, B.; Van Den Broeke, M.R.; Van De Berg, W.J.; Noël, B.; Usher, M. Distinct patterns of seasonal Greenland glacier velocity. Geophys. Res. Lett. 2014, 41, 7209–7216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Armstrong, W.H.; Anderson, R.S.; Fahnestock, M.A. Spatial Patterns of Summer Speedup on South Central Alaska Glaciers. Geophys. Res. Lett. 2017, 44, 9379–9388. [Google Scholar] [CrossRef]
- Moon, T.; Joughin, I.; Smith, B. Seasonal to multiyear variability of glacier surface velocity, terminus position, and sea ice/ice mélange in northwest Greenland. J. Geophys. Res. Earth Surf. 2015, 120, 818–833. [Google Scholar] [CrossRef]
- Lemos, A.; Shepherd, A.; McMillan, M.; Hogg, A.E.; Hatton, E.; Joughin, I. Ice velocity of Jakobshavn Isbræ, Petermann Glacier, Nioghalvfjerdsfjorden, and Zachariæ Isstrøm, 2015–2017, from Sentinel 1-a/b SAR imagery. Cryosphere 2018, 12, 2087–2097. [Google Scholar] [CrossRef] [Green Version]
- Shannon, S.R.; Payne, A.J.; Bartholomew, I.D.; Van Den Broeke, M.R.; Edwards, T.L.; Fettweis, X.; Gagliardini, O.; Gillet-Chaulet, F.; Goelzer, H.; Hoffman, M.J.; et al. Enhanced basal lubrication and the contribution of the Greenland ice sheet to future sea-level rise. Proc. Natl. Acad. Sci. USA 2013, 110, 14156–14161. [Google Scholar] [CrossRef] [Green Version]
- Palmer, S.; Shepherd, A.; Nienow, P.; Joughin, I. Seasonal speedup of the Greenland Ice Sheet linked to routing of surface water. Earth Planet. Sci. Lett. 2011, 302, 423–428. [Google Scholar] [CrossRef]
- Tedstone, A.J.; Nienow, P.W.; Sole, A.J.; Mair, D.W.F.; Cowton, T.R.; Bartholomew, I.D.; King, M.A. Greenland ice sheet motion insensitive to exceptional meltwater forcing. Proc. Natl. Acad. Sci. USA 2013, 110, 19719–19724. [Google Scholar] [CrossRef] [Green Version]
- Rignot, E.; Mouginot, J.; Scheuchl, B.; Van Den Broeke, M.; Van Wessem, M.J.; Morlighem, M. Four decades of Antarctic ice sheet mass balance from 1979–2017. Proc. Natl. Acad. Sci. USA 2019, 116, 1095–1103. [Google Scholar] [CrossRef] [Green Version]
- Mouginot, J.; Rignot, E.; Bjørk, A.A.; van den Broeke, M.; Millan, R.; Morlighem, M.; Noël, B.; Scheuchl, B.; Wood, M. Forty-six years of Greenland Ice Sheet mass balance from 1972 to 2018. Proc. Natl. Acad. Sci. USA 2019, 116, 9239–9244. [Google Scholar] [CrossRef] [Green Version]
- Morlighem, M.; Rignot, E.; Seroussi, H.; Larour, E.; Ben Dhia, H.; Aubry, D. A mass conservation approach for mapping glacier ice thickness. Geophys. Res. Lett. 2011, 38, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Goelzer, H.; Nowicki, S.; Edwards, T.; Beckley, M.; Abe-Ouchi, A.; Aschwanden, A.; Calov, R.; Gagliardini, O.; Gillet-Chaulet, F.; Golledge, N.R.; et al. Design and results of the ice sheet model initialisation initMIP-Greenland: An ISMIP6 intercomparison. Cryosphere 2018, 12, 1433–1460. [Google Scholar] [CrossRef] [Green Version]
- Seroussi, H.; Nowicki, S.; Simon, E.; Abe-Ouchi, A.; Albrecht, T.; Brondex, J.; Cornford, S.; Dumas, C.; Gillet-Chaulet, F.; Goelzer, H.; et al. initMIP-Antarctica: An ice sheet model initialization experiment of ISMIP6. Cryosphere 2019, 13, 1441–1471. [Google Scholar] [CrossRef] [Green Version]
- Mouginot, J.; Scheuch, B.; Rignot, E. Mapping of ice motion in antarctica using synthetic-aperture radar data. Remote Sens. 2012, 4, 2753–2767. [Google Scholar] [CrossRef] [Green Version]
- Rignot, E.; Mouginot, J. Ice flow in Greenland for the International Polar Year 2008–2009. Geophys. Res. Lett. 2012, 39, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Joughin, I.; Smith, B.E.; Howat, I.M.; Scambos, T.; Moon, T. Greenland flow variability from ice-sheet-wide velocity mapping. J. Glaciol. 2010, 56, 415–430. [Google Scholar] [CrossRef] [Green Version]
- Fahnestock, M.; Scambos, T.; Moon, T.; Gardner, A.; Haran, T.; Klinger, M. Rapid large-area mapping of ice flow using Landsat 8. Remote Sens. Environ. 2016, 185, 84–94. [Google Scholar] [CrossRef] [Green Version]
- Scambos, T.; Fahnestock, M.; Moon, T.; Gardner, A.; Klinger, M. Global Land Ice Velocity Extraction from Landsat 8 (Go-LIVE); Version 1; NSIDC: National Snow and Ice Data Center: Boulder, CO, USA, 2016; Volume 10, p. N5ZP442B. [Google Scholar]
- Nagler, T.; Rott, H.; Hetzenecker, M.; Wuite, J.; Potin, P. The Sentinel-1 mission: New opportunities for ice sheet observations. Remote Sens. 2015, 7, 9371–9389. [Google Scholar] [CrossRef] [Green Version]
- Mouginot, J.; Rignot, E.; Scheuchl, B.; Millan, R. Comprehensive Annual Ice Sheet Velocity Mapping Using Landsat-8, Sentinel-1, and RADARSAT-2 Data. Remote Sens. 2017, 9, 364. [Google Scholar] [CrossRef] [Green Version]
- Rosenau, R.; Scheinert, M.; Dietrich, R. A processing system to monitor Greenland outlet glacier velocity variations at decadal and seasonal time scales utilizing the Landsat imagery. Remote Sens. Environ. 2015, 169, 1–19. [Google Scholar] [CrossRef]
- Joughin, I.; Smith, B.E.; Howat, I. Greenland Ice Mapping Project: Ice flow velocity variation at sub-monthly to decadal timescales. Cryosphere 2018, 12, 2211–2227. [Google Scholar] [CrossRef] [Green Version]
- Altena, B.; Kääb, A. Weekly glacier flow estimation from dense satellite time series using adapted optical flow technology. Front. Earth Sci. 2017, 5, 1–12. [Google Scholar] [CrossRef]
- Millan, R.; Mouginot, J.; Rabatel, A.; Jeong, S.; Cusicanqui, D.; Derkacheva, A.; Chekki, M. Mapping surface flow velocity of glaciers at regional scale using a multiple sensors approach. Remote Sens. 2019, 11, 2498. [Google Scholar] [CrossRef] [Green Version]
- Altena, B.; Scambos, T.; Fahnestock, M.; Kääb, A. Extracting recent short-term glacier velocity evolution over southern Alaska and the Yukon from a large collection of Landsat data. Cryosphere 2019, 13, 795–814. [Google Scholar] [CrossRef] [Green Version]
- de Fleurian, B.; Morlighem, M.; Seroussi, H.; Rignot, E.; van den Broeke, M.R.; Kuipers Munneke, P.; Mouginot, J.; Smeets, P.C.; Tedstone, A.J. A modeling study of the effect of runoff variability on the effective pressure beneath Russell Glacier, West Greenland. J. Geophys. Res. Earth Surf. 2016, 121, 1834–1848. [Google Scholar] [CrossRef]
- Fitzpatrick, A.A.W.; Hubbard, A.; Joughin, I.; Quincey, D.J.; As, D.V.A.N.; Mikkelsen, A.P.B.; Doyle, S.H.; Hasholt, B.; Jones, G.A. Ice flow dynamics and surface meltwater flux at a land-terminating sector of the Greenland ice sheet. J. Glaciol. 2013, 59, 687–696. [Google Scholar] [CrossRef] [Green Version]
- Joughin, I.; Das, S.B.; King, M.A.; Smith, B.E.; Howat, I.W.; Moon, T. Seasonal Speedup Along the Western Flank of the Greenland Ice Sheet. Science 2008, 320, 781–783. [Google Scholar] [CrossRef]
- Lemos, A.; Shepherd, A.; Mcmillan, M.; Hogg, A.E. Seasonal Variations in the Flow of Land-Terminating Glaciers in Central-West Greenland Using Sentinel-1 Imagery. Remote Sens. 2018, 10, 1878. [Google Scholar] [CrossRef] [Green Version]
- Scheuchl, B.; Mouginot, J.; Rignot, E.; Morlighem, M.; Khazendar, A. Grounding line retreat of Pope, Smith, and Kohler Glaciers, West Antarctica, measured with Sentinel-1a radar interferometry data. Geophys. Res. Lett. 2016, 43, 8572–8579. [Google Scholar] [CrossRef] [Green Version]
- Michel, R.; Righot, E. Flow of Glaciar Moreno, Argentina, from repeat-pass Shuttle Imaging Radar images: Comparison of the phase correlation method with radar interferometry. J. Glaciol. 1994, 45, 93–100. [Google Scholar] [CrossRef]
- Jeong, S.; Howat, I.M. Performance of Landsat 8 Operational Land Imager for mapping ice sheet velocity. Remote Sens. Environ. 2015, 170, 90–101. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Peltzer, G.; Simons, M. Updated repeat orbit interferometry package released. Eos 2004, 85, 47. [Google Scholar] [CrossRef]
- Maier, N.; Humphrey, N.; Harper, J.; Meierbachtol, T. Sliding dominates slow-flowing margin regions, Greenland Ice Sheet. Sci. Adv. 2019, 5, eaaw5406. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cleveland, W.S. Robust locally weighted regression and smoothing scatterplots. J. Am. Stat. Assoc. 1979, 74, 829–836. [Google Scholar] [CrossRef]
- Cleveland, W.S.; Devlin, S.J. Locally weighted regression: An approach to regression analysis by local fitting. J. Am. Stat. Assoc. 1988, 83, 596–610. [Google Scholar] [CrossRef]
- Gumbricht, T. Soil Moisture Dynamics Estimated from MODIS Time Series Images. Multitemporal Remote Sens. Methods Appl. 2016, 20, 233. [Google Scholar]
- Cai, Z.; Jönsson, P.; Jin, H.; Eklundh, L. Performance of smoothing methods for reconstructing NDVI time-series and estimating vegetation phenology from MODIS data. Remote Sens. 2017, 9, 1271. [Google Scholar] [CrossRef] [Green Version]
- Moreno, Á.; García-Haro, F.J.; Martínez, B.; Gilabert, M.A. Noise reduction and gap filling of fAPAR time series using an adapted local regression filter. Remote Sens. 2014, 6, 8238–8260. [Google Scholar] [CrossRef] [Green Version]
- McClarren, R.G. Computational Nuclear Engineering and Radiological Science Using Python; Chapter 10—Interpolation; Academic Press: Cambridge, MA, USA, 2018; p. 460. [Google Scholar] [CrossRef]
- de Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978. [Google Scholar]
- Paul, F.; Bolch, T.; Kääb, A.; Nagler, T.; Nuth, C.; Scharrer, K.; Shepherd, A.; Strozzi, T.; Ticconi, F.; Bhambri, R.; et al. The glaciers climate change initiative: Methods for creating glacier area, elevation change and velocity products. Remote Sens. Environ. 2015, 162, 408–426. [Google Scholar] [CrossRef] [Green Version]
- Hadhri, H.; Vernier, F.; Atto, A.M.; Trouvé, E. Time-lapse optical flow regularization for geophysical complex phenomena monitoring. ISPRS J. Photogramm. Remote Sens. 2019, 150, 135–156. [Google Scholar] [CrossRef]
- Ren, H.; Cromwell, E.; Kravitz, B.; Chen, X. Using deep learning to fill spatio-temporal data gaps in hydrological monitoring networks. Hydrol. Earth Syst. Sci. Discuss. 2019, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Pashova, L.; Koprinkova-Hristova, P.; Popova, S. Gap filling of daily sea levels by artificial neural networks. TransNav Int. J. Mar. Navig. Saf. Sea Trans. 2013, 7. [Google Scholar] [CrossRef]
- Rodriguez, H.; Flores, J.J.; Puig, V.; Morales, L.; Guerra, A.; Calderon, F. Wind speed time series reconstruction using a hybrid neural genetic approach. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2017; Volume 93. [Google Scholar] [CrossRef] [Green Version]
- Scambos, T.A.; Dutkiewicz, M.J.; Wilson, J.C.; Bindschadler, R.A. Application of image cross-correlation to the measurement of glacier velocity using satellite image data. Remote Sens. Environ. 1992, 42, 177–186. [Google Scholar] [CrossRef]
- Jeong, S.; Howat, I.M.; Ahn, Y. Improved Multiple Matching Method for Observing Glacier Motion with Repeat Image Feature Tracking. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2431–2441. [Google Scholar] [CrossRef] [PubMed]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Derkacheva, A.; Mouginot, J.; Millan, R.; Maier, N.; Gillet-Chaulet, F. Data Reduction Using Statistical and Regression Approaches for Ice Velocity Derived by Landsat-8, Sentinel-1 and Sentinel-2. Remote Sens. 2020, 12, 1935. https://doi.org/10.3390/rs12121935
Derkacheva A, Mouginot J, Millan R, Maier N, Gillet-Chaulet F. Data Reduction Using Statistical and Regression Approaches for Ice Velocity Derived by Landsat-8, Sentinel-1 and Sentinel-2. Remote Sensing. 2020; 12(12):1935. https://doi.org/10.3390/rs12121935
Chicago/Turabian StyleDerkacheva, Anna, Jeremie Mouginot, Romain Millan, Nathan Maier, and Fabien Gillet-Chaulet. 2020. "Data Reduction Using Statistical and Regression Approaches for Ice Velocity Derived by Landsat-8, Sentinel-1 and Sentinel-2" Remote Sensing 12, no. 12: 1935. https://doi.org/10.3390/rs12121935