Absolute Calibration or Validation of the Altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan)

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Interpretation of information from internal-calibration modes of the sensors;
- Selection of the best algorithm in picking up the range in the radar echoes in various contexts;
- Selection of the best measurement or model to account for the delay in travelling through the atmosphere;
- Validation of the fully corrected estimates of the heights, whether it is sea-level or inland water-level.
2. Methodology for C/V of Radar Altimeters
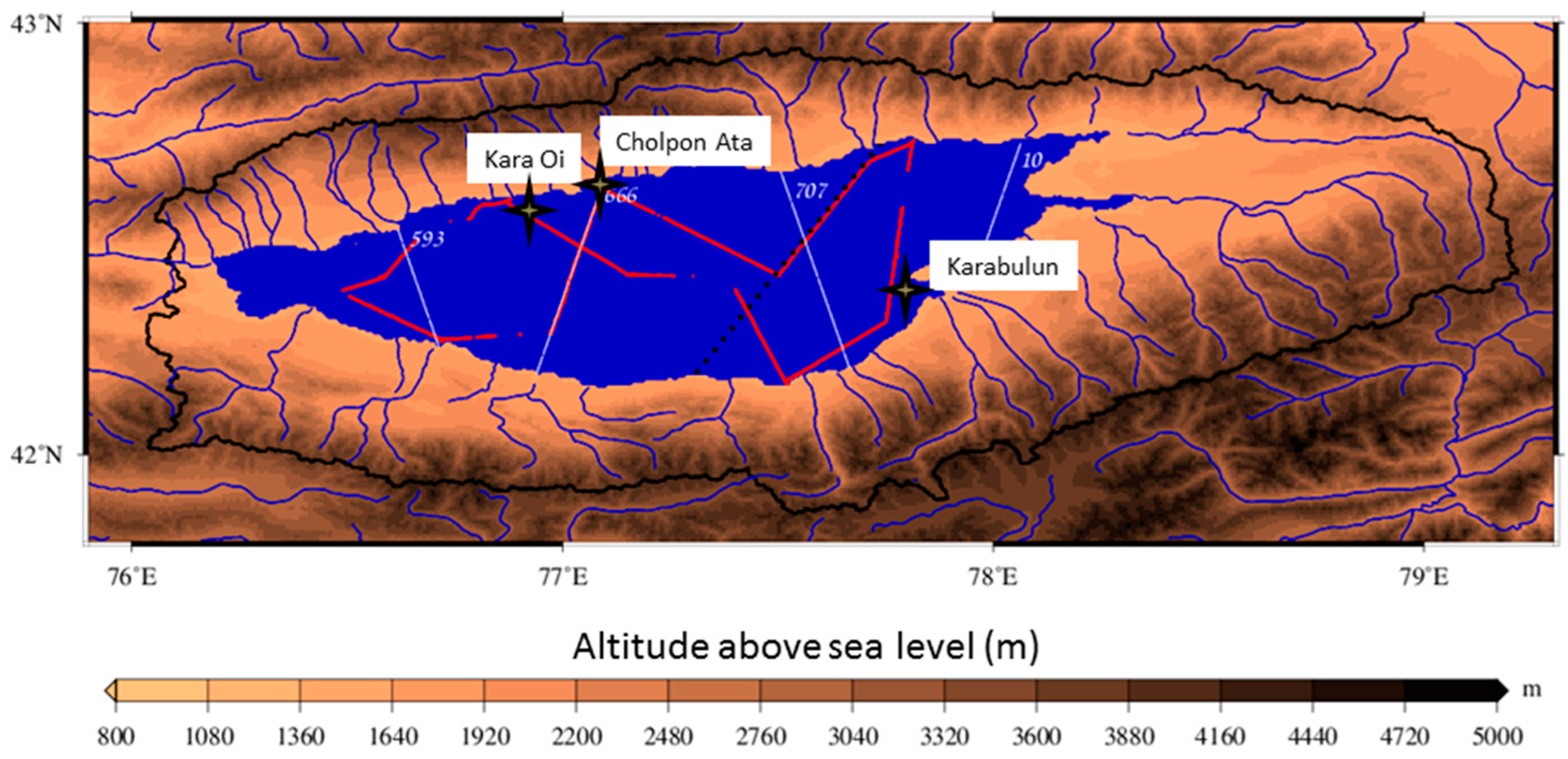
2.1. Lake Issykkul C/V Site Description
2.2. Instrumental Design of the Field Campaigns
- The weather conditions, including wind driven waves and Seiche effects.
- The computation of the height of the GPS antenna, embarked on the boat.
- The estimate of the distance between this antenna and the water surface during the cruise.
2.3. Ground Estimate of the Water Height
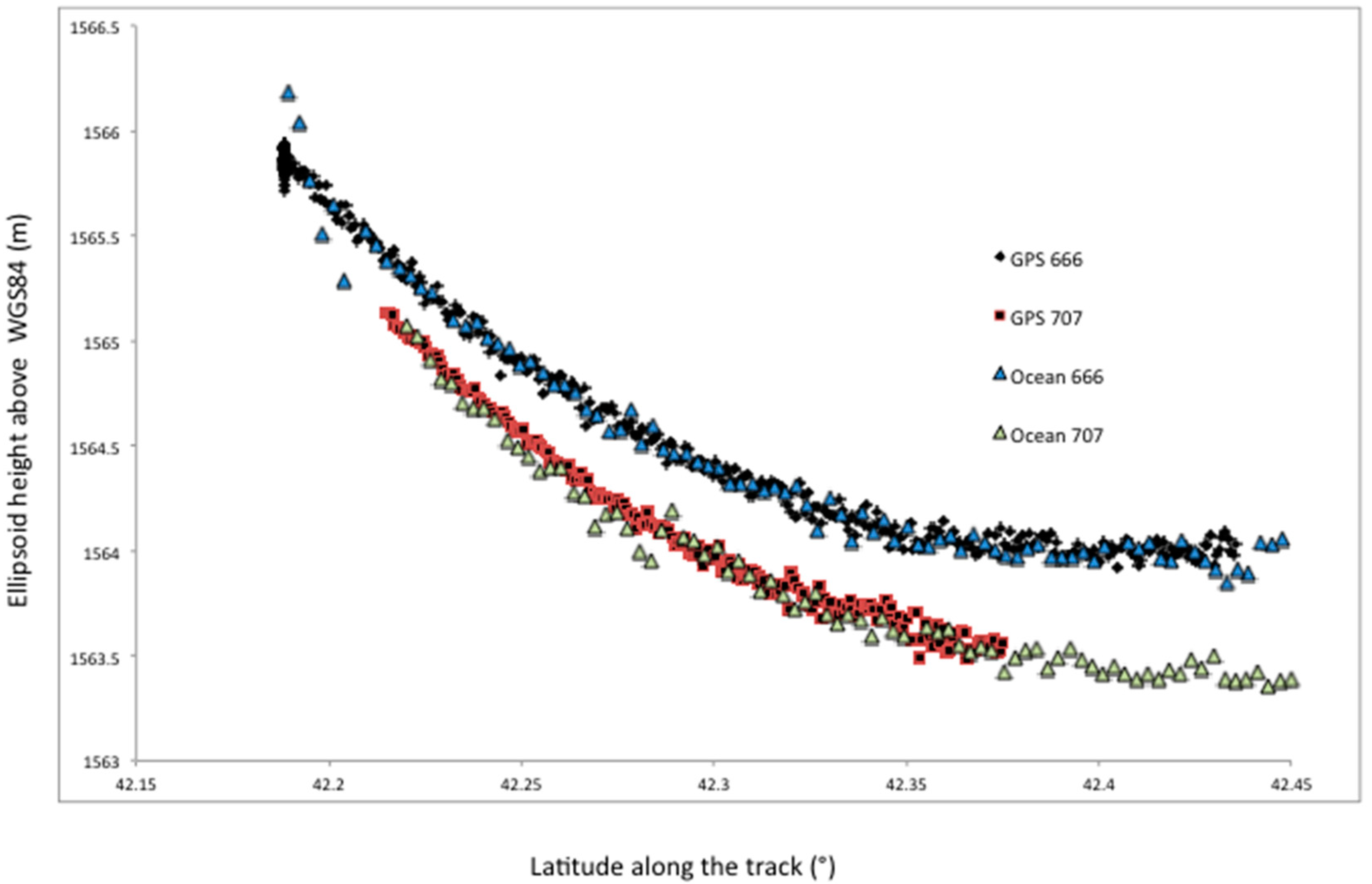
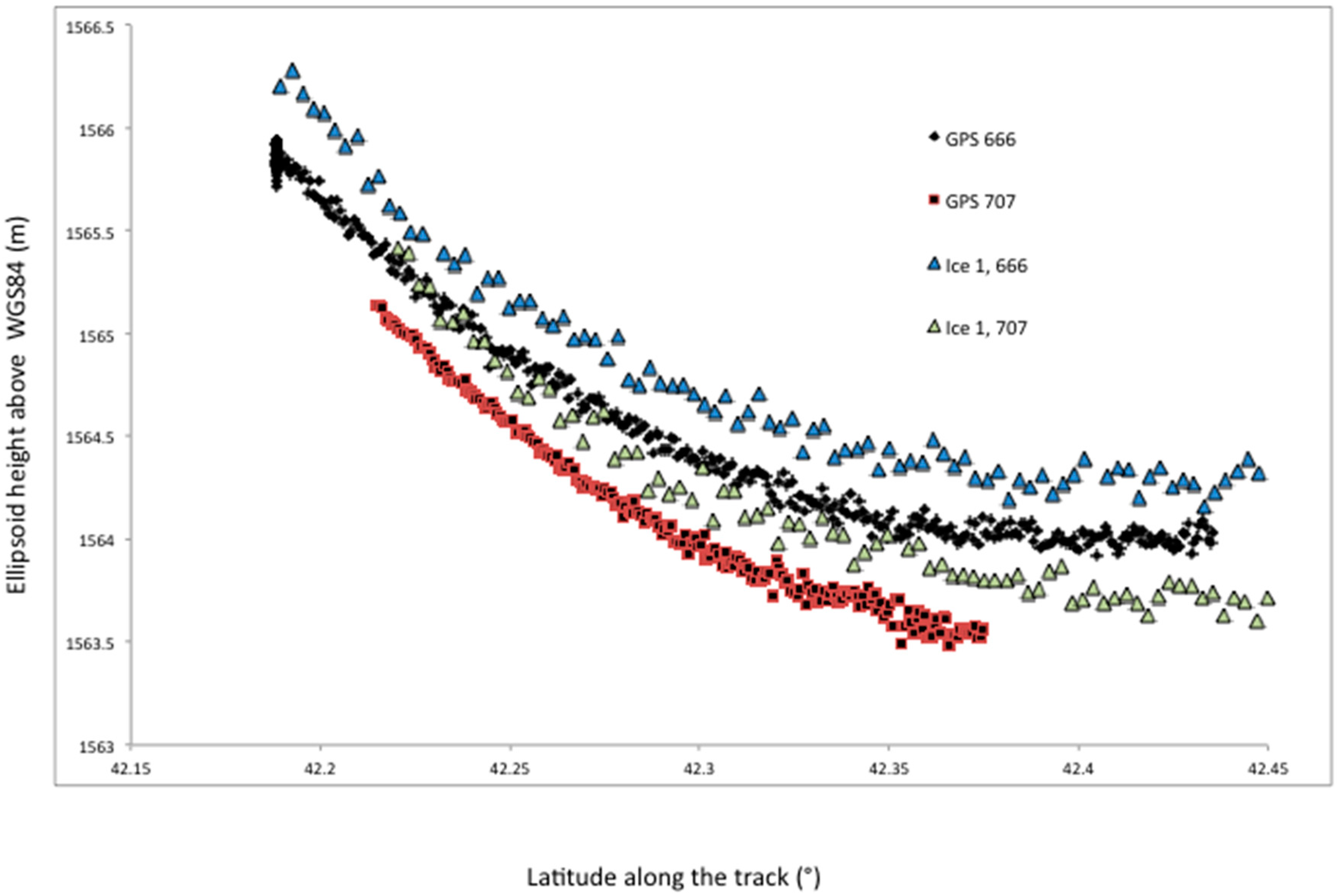
2.4. Satellite Estimate of the Water Height
2.5. Calculation of the Altimeter Bias
3. Results
3.1. Absolute Biases of Sentinel-3A
3.2. Absolute Biases of Jason-3
3.3. Relative Retracking Algorithms Offsets
3.4. Quality Assessment: Long Term Comparison with In-Situ Measurements
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bindoff, N.; Willebrand, J.; Artale, V.; Cazenave, A.; Gregory, J.; Gulev, S.; Hanawa, K.; Le Quéré, C.; Levitus, S.; Nojiri, Y.; et al. Ocean Climate change and Sea Level. In Climate Change 2007: The physical Science Basis. Contribution of Working Group I to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change (IPCC); Cambridge University Press: Cambridge, UK; New York, NY, USA, 2007. [Google Scholar]
- Cazenave, A.; Nerem, R.S. Present-Day sea level change: Observations and causes. Rev. Geophys. 2004, 42, RG3001. [Google Scholar] [CrossRef]
- Shum, C.K.; Yi, Y.; Cheng, K.; Kuo, C.; Braun, A.; Calmant, S.; Chambers, D. Calibration of Jason-1 Altimeter over lake Erie. Mar. Geod. 2003, 26, 335–354. [Google Scholar] [CrossRef]
- Cheng, K.-C.; Kuo, C.-Y.; Tseng, H.-Z.; Yi, Y.; Shum, C.K. Lake surface height Calibration of Jason-1 and Jason-2 over the Great Lakes. Mar. Geod. 2010, 33, 186–203. [Google Scholar] [CrossRef]
- Calmant, S.; Santos Da Silva, J.; Medeiros Moreira, D.; Seyler, D.; Shum, C.K.; Cretaux, J.-F.; Gabalda, G. Detection of Envisat RA2/ICE-1 retracked radar altimetry bias over the Amazon basin rivers using GPS. J. Adv. Space Res. 2013, 51, 1551–1564. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Allain, D.; Bergé-Nguyen, M.; Calmant, S.; Cretaux, J.-F.; Lyard, F.; Testut, L.; Bonnet, M.-P.; et al. From Ocean to Inland Waters Monitoring (FOAM), Ocean Surface Topography Science Team (OSTST), Scientific Investigations 2017–2020. Available online: https://tinyurl.com/FOAM-OSTST (accessed on 28 July 2017).
- Birkett, C.M. The contribution of TOPEX/POSEIDON to the global monitoring of climatically sensitive lakes. J. Geophys. Res. [Oceans] 1995, 100, 25179–25204. [Google Scholar] [CrossRef]
- Calmant, S.; Seyler, F.; Cretaux, J.-F. Monitoring Continental Surface Waters by Satellite Altimetry. Surv. Geophys. 2008, 29, 247–269. [Google Scholar] [CrossRef]
- Cretaux, J.F.; Calmant, S.; Romanovski, V.; Shabunin, A.; Lyard, F.; Berge-Nguyen, M.; Cazenave, A.; Hernandez, F.; Perosanz, F. An absolute calibration site for radar altimeters in the continental domain: Lake Issykkul in Central Asia. J. Geod. 2009, 83, 723–735. [Google Scholar] [CrossRef]
- Cretaux, J.-F.; Calmant, S.; Romanovsky, V.V.; Perosanz, F.; Tashbaeva, S.; Bonnefond, P.; Moreira, D.; Shum, C.K.; Nino, F.; Bergé-Nguyen, M.; et al. Absolute Calibration of Jason radar altimeters from GPS kinematic campaigns over Lake Issykkul. Mar. Geod. 2011, 34, 291–318. [Google Scholar] [CrossRef]
- Cretaux, J.-F.; Bergé-Nguyen, M.; Calmant, S.; Romanovsky, V.V.; Meyssignac, B.; Perosanz, F.; Tashbaeva, S.; Arsen, A.; Fund, F.; Martignago, N.; et al. Calibration of envisat radar altimeter over Lake Issykkul. J. Adv. Space Res. 2013, 51, 1523–1541. [Google Scholar] [CrossRef]
- Verron, J.; Bonnefond, P.; Aouf, L.; Birol, F.; Suchandra, A.B.; Calmant, S.; Conchy, T.; Cretaux, J.-F.; Dibarboure, G.; Dubey, A.K.; et al. The benefits of the Ka-Band as evidenced from the SARAL/AltiKa Altmietric Mission: Scientific Applications. Remote Sens. 2018, 10, 163. [Google Scholar] [CrossRef]
- Romanovsky, V.V.; Tashbaeva, S.; Cretaux, J.-F.; Calmant, S.; Drolon, V. The closed Lake Issyk-Kul as an indicator of global warming in Tien-Shan. J. Nat. Sci. 2013, 5, 608–623. [Google Scholar] [CrossRef]
- Rodriguez, E. Surface Water and Ocean Topography Project, Science Requirement Document, Release March 2016, JPL D-61923. Available online: https://swot.jpl.nasa.gov/docs/D-61923_SRD_Rev_A_20160318.pdf (accessed on 23 July 2018).
- Haines, B.J.; Desai, S.D.; Born, G.H. The Harvest Experiment: Calibration of the Climate Data Record from TOPEX/Poseidon, Jason-1 and the Ocean Surface Topography Mission. Mar. Geod. 2010, 33, 91–113. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Jan, G. Absolute Calibration of Jason-1 and Jason-2 Altimeters in Corsica during the Formation Flight Phase. Mar. Geod. 2010, 33, 80–90. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Ioannides, R.T.; Tziavos, I.N.; Vergos, G.S.; Hausleitner, W.; Frantzis, X.; Tripolitsiotis, A.; Partsinevelos, P.; Andrikopoulos, D. Statistical Models and Latest Results in the Determination of the Absolute Bias for the Radar Altimeters of Jason Satellites using the Gavdos Facility. Mar. Geod. 2010, 33, 114–149. [Google Scholar] [CrossRef]
- Watson, C.; White, R.N.; Church, J.; Burgette, R.; Tregoning, P.; Coleman, R. Absolute Calibration in Bass Strait, Australia: TOPEX, Jason-1 and OSTM/Jason-2. Mar. Geod. 2011, 34, 242–260. [Google Scholar] [CrossRef]
- Loyer, S.; Perosanz, F.; Mercier, F.; Capdeville, H.; Marty, J.-C. Zero-difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center. J. Geod. 2012, 86, 991–1003. [Google Scholar] [CrossRef]
- Bonnefond, P.; Verron, J.; Aublanc, J.; Babu, K.N.; Berge-Nguyen, M.; Cancet, M.; Chaudhary, A.; Cretaux, J.-F.; Frappart, F.; Haines, B.J.; et al. The benefits of the Ka-Band as evidenced from the SARAL/AltiKa Altimetric mission: Quality assessment and unique characteristics of AltiKa data. Remote Sens. 2018, 10, 83. [Google Scholar] [CrossRef]
- Marty, J.-C.; Loyer, S.; Perosanz, F.; Mercier, F.; Bracher, G.; Legresy, B.; Portier, L.; Capdeville, H.; Fund, F.; Lemoine, J.-M.; et al. GINS: The CNES/GRGS GNSS scientific software. In Proceedings of the 3rd International Colloquium Scientific and Fundamental Aspects of the Galileo Programme, ESA Proceedings WPP326, Copenhagen, Denmark, 31 August–2 September 2011. [Google Scholar]
- Fund, F.; Perosanz, F.; Testut, L.; Loyer, S. An Integer Precise Point Positioning technique for sea surface observations using a GPS buoy. Adv. Space Res. 2013, 51, 1311–1322. [Google Scholar] [CrossRef]
- Barbu, A.; Laurent-Varin, J.; Perosanz, F.; Mercier, F.; Marty, J.C. Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning seismic application. Adv. Space Res. 2018, 61, 448–456. [Google Scholar] [CrossRef]
- Cretaux, J.-F.; Abarca Del Rio, R.; Berge-Nguyen, M.; Arsen, A.; Drolon, V.; Clos, G.; Maisongrande, P. Lake volume monitoring from Space. Surv. Geophys. 2016, 37, 269–305. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Seitz, F. Kalman filter approach for estimating water level time series over inland waters using multi-mission satellite altimetry. HESS Discuss. 2015, 12, 4813–4855. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites. In The Use of Artificial Satellites for Geodesy, Geophysics Monograph Service; American Geophysical Union: Washington, DC, USA, 1972; Volume 15, pp. 247–251. [Google Scholar]
- Fernandes, J.; Lázaro, C.; Nunes, A.L.; Scharoo, R. Atmospheric corrections for altimetry studies over inland water. Remote Sens. 2014, 6, 4952–4997. [Google Scholar] [CrossRef]
- Fernandes, M.J.; Nunes, A.L.; Lazaro, C. Analysis and inter-calibration of wet path delay datasets to compute the wet tropospheric correction for CryoSat-2 over ocean. Remote Sens. 2013, 5, 4977–5005. [Google Scholar] [CrossRef]
- Birkett, C.M.; Beckley, B. Investigating the performance of the Jason-2/OSTM Radar Altimeter over Lakes and Reservoirs. Mar. Geod. 2010, 33, 204–238. [Google Scholar] [CrossRef]
- Iijima, B.A.; Harris, I.L.; Ho, C.M.; Lindqwister, U.J.; Mannucci, A.J.; Pi, X.; Reyes, M.J.; Sparks, L.C.; Wilson, B.D. Automated daily process for global ionospheric total electron content maps and satellite ocean altimeter ionospheric calibration based on Global Positioning System data. J. Atmos. Solar-Terr. Phys. 1999, 61, 1205–1218. [Google Scholar] [CrossRef]
- Cartwright, D.E.; Tayler, R.J. New computations of the tide-generating potential. Geophys. J. R. Astr. Soc. 1971, 23, 45–74. [Google Scholar] [CrossRef]
- AVISO Handbook. Available online: http://www.aviso.altimetry.fr/fileadmin/documents/data/tools/hdbk_j3.pdf (accessed on 23 July 2018).
- ESA Handbook. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-3-altimetry (accessed on 23 July 2018).
- Haines, B.J.; Desai, S.; Dodge, A.; Leben, B.; Masters, D.; Meining, C.; Nerem, S.; Shah, R.; Stalin, S. Connecting Jason-3 to the long-term sea level record: Results from harvest and regional campaigns. Presented at the Ocean Surface Topography Science Team (OSTST), Miami, FL, USA, 23–27 October 2017. [Google Scholar]
- Watson, C.; Legresy, B.; King, M.; Hextall, W. Updated altimeter absolute bias results from Bass strait, Australia. Presented at the Ocean Surface Topography Science Team (OSTST), Miami, FL, USA, 23–27 October 2017. [Google Scholar]
- Brown, G.S. Skylab S-193 Radar Experiment Analysis and Results; NASA Report NASA CR-2763; National Aeronautics and Space Administration: Washington, DC, USA, 1977.
- Ričko, M.; Birkett, C.M.; Carton, J.A.; Cretaux, J.-F. Intercomparison and validation of continental water level products derived from satellite radar altimetry. J. Appl. Remote Sens. 2012, 6, 061710. [Google Scholar] [CrossRef] [Green Version]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Crétaux, J.-F.; Bergé-Nguyen, M.; Calmant, S.; Jamangulova, N.; Satylkanov, R.; Lyard, F.; Perosanz, F.; Verron, J.; Samine Montazem, A.; Le Guilcher, G.; et al. Absolute Calibration or Validation of the Altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sens. 2018, 10, 1679. https://doi.org/10.3390/rs10111679
Crétaux J-F, Bergé-Nguyen M, Calmant S, Jamangulova N, Satylkanov R, Lyard F, Perosanz F, Verron J, Samine Montazem A, Le Guilcher G, et al. Absolute Calibration or Validation of the Altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sensing. 2018; 10(11):1679. https://doi.org/10.3390/rs10111679
Chicago/Turabian StyleCrétaux, Jean-François, Muriel Bergé-Nguyen, Stephane Calmant, Nurzat Jamangulova, Rysbek Satylkanov, Florent Lyard, Felix Perosanz, Jacques Verron, Amanda Samine Montazem, Gianfranco Le Guilcher, and et al. 2018. "Absolute Calibration or Validation of the Altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan)" Remote Sensing 10, no. 11: 1679. https://doi.org/10.3390/rs10111679